

Magnetic navigation AGV (Automated Guided Vehicle) control system and method
A technology of control system and magnetic navigation, applied in the direction of control/adjustment system, two-dimensional position/channel control, non-electric variable control, etc., can solve the problems of great influence on reliability, unfavorable control, high manufacturing cost, etc., and achieve change The effect of easy route, stable data transmission and simple laying
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
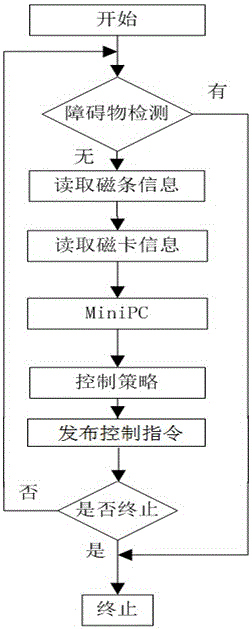
[0011] The present invention will be further described below in conjunction with the accompanying drawings and implementation examples.
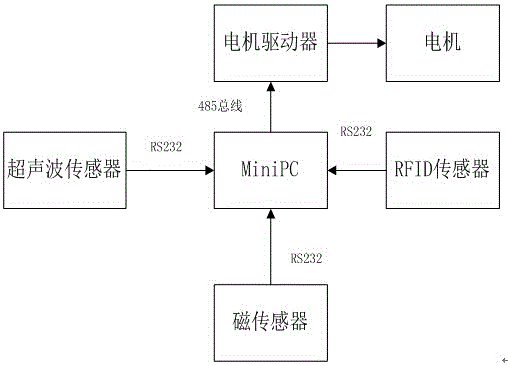
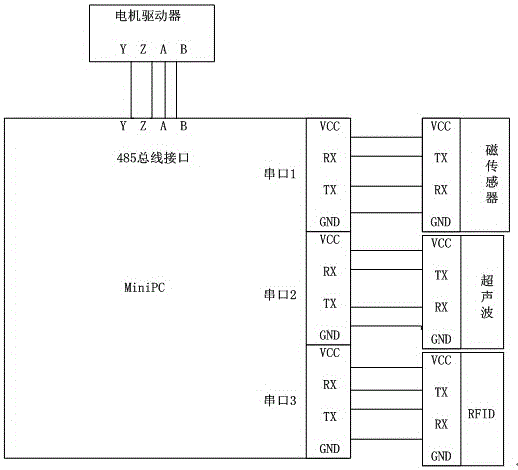
[0012] Such as figure 1 , 2 , 3, 4, and 5, a magnetic navigation AGV control system includes a drive system, a control unit, a magnetic sensor, a driving wheel, an RFID sensor, a universal wheel, a car body and an ultrasonic sensor, and the driving wheel on the bottom surface of the car body A total of two are fixed on the left and right sides of the middle part respectively, called the left driving wheel and the right driving wheel, a total of four universal wheels are fixed at the four corners, the RFID sensor is fixed at the central position, and the magnetic sensor is fixed at the front and rear of the RFID sensor. One, the driving system and the control unit are fixed in the car body. The driving system includes a motor driver and a motor. There is an ultrasonic sensor at the front end of the car body. The motor driver is connected to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More