Unmanned aerial vehicle accurate position landing method based on image processing and fuzzy control
A technology of fuzzy control and image processing, which is applied in the fields of image recognition and navigation communication, can solve problems such as landing errors and insufficient GPS accuracy, and achieve the effects of simple design, improved intelligence, and easy application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
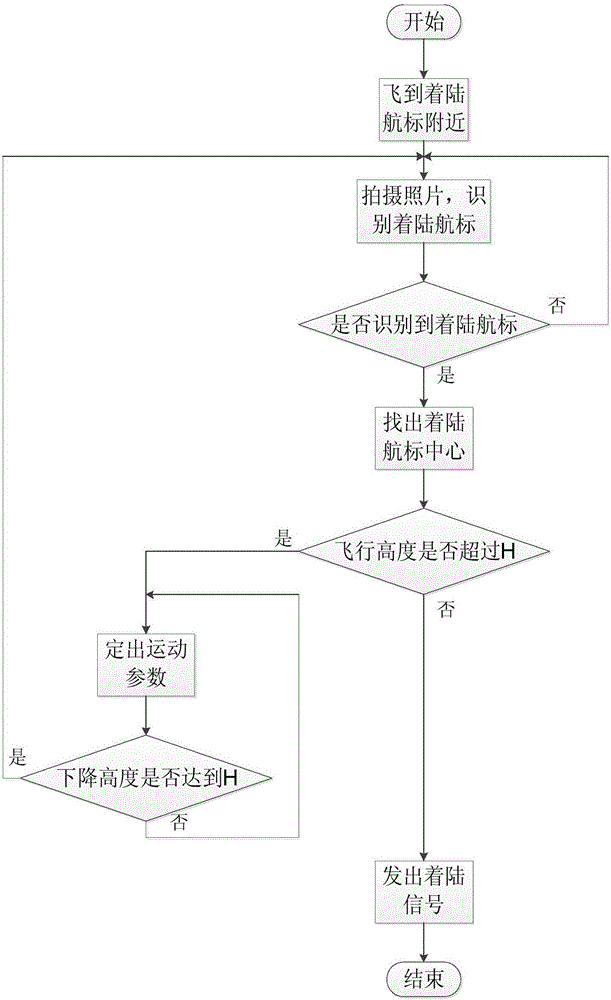
[0034] The specific working process of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0035] Embodiments of the present invention are as follows:
[0036] The playground of a certain school is selected as the implementation object of this embodiment, and the playground is 150 meters long and 80 meters wide. The landing beacon is placed in the center of the playground, the ground control station is set 10 meters away from the landing beacon, and the drone is about 50 meters above the ground.
[0037] Step 1. Use the GPS satellite navigation system to make the drone near the landing beacon, that is, let the drone be within the coverage of the wireless local area network of the ground control station. At this time, the ground control station sends a signal, and the camera and barometric altimeter start to work.
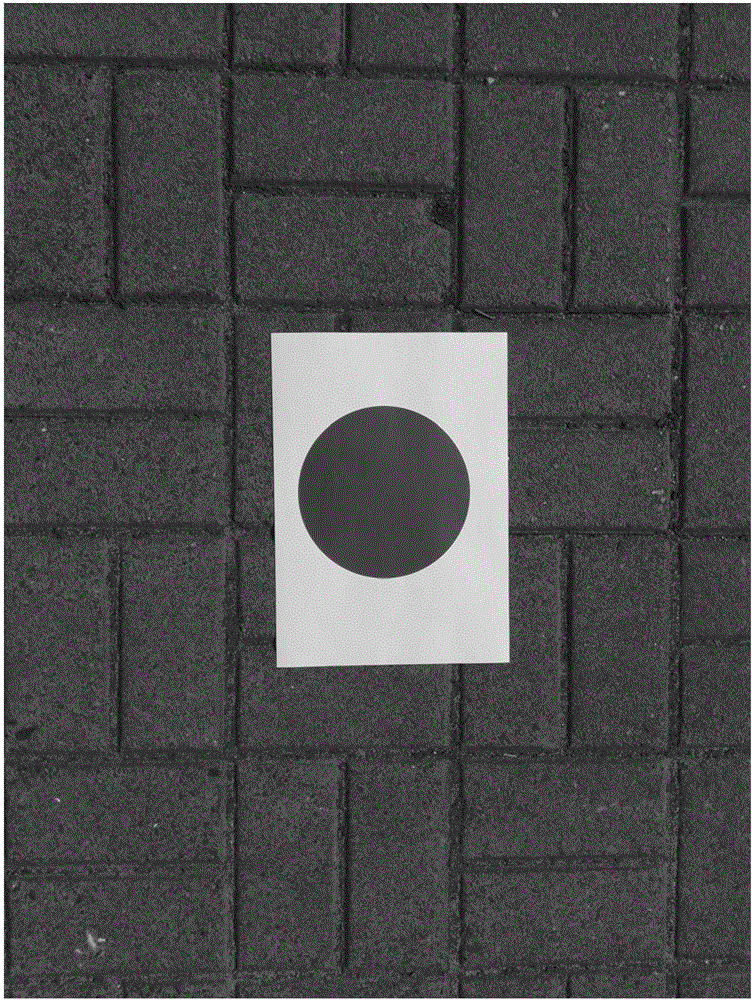
[0038] Such as figure 2 As shown, the landing beacon adopted in this embodiment is a blue circular ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com