

Unmanned aerial vehicle flight control system having multisensor redundant backup
A flight control system, redundant backup technology, applied in the direction of general control system, control/regulation system, non-electric variable control, etc., can solve the problems of aircraft normal flight influence, poor reliability, small size, etc., to improve the weight of flight control and cost, and the effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further elaborated and illustrated below in conjunction with the accompanying drawings and specific embodiments. The technical features of the various implementations in the present invention can be combined accordingly on the premise that there is no conflict with each other.
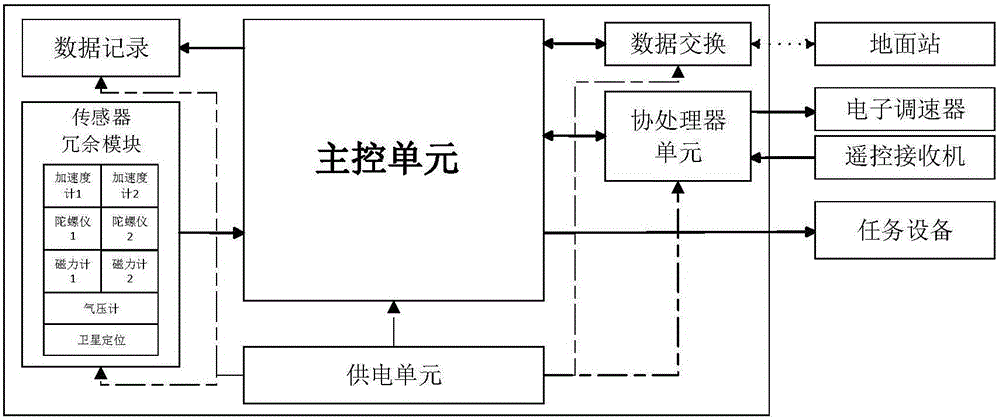
[0022] The multi-sensor redundant UAV flight control system of the present invention can be used for multi-rotor, helicopter, and fixed-wing UAVs. The system is composed of main control unit, coprocessor unit, sensor redundancy unit, data exchange unit, data recording unit and power supply unit. details as follows:
[0023] Refer to attached figure 1 , a UAV flight control system with multi-sensor redundant backup, the UAV flight control system includes: a main control unit for controlling the aircraft; a coprocessor unit for expanding the interface of the main control unit; Redundant sensor units for collecting aircraft data, including two or more accelerometers...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More