

Binocular-vision-based rapid detection method for three-dimensional information of space object
A technology for three-dimensional information and space objects, applied in image data processing, instruments, calculations, etc., can solve the problems of high equipment price, real-time performance and matching accuracy cannot be satisfied at the same time, and achieve the improvement of matching speed and real-time three-dimensional information detection. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The purpose of the present invention will be further described in detail through specific examples below, and the examples cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following examples.
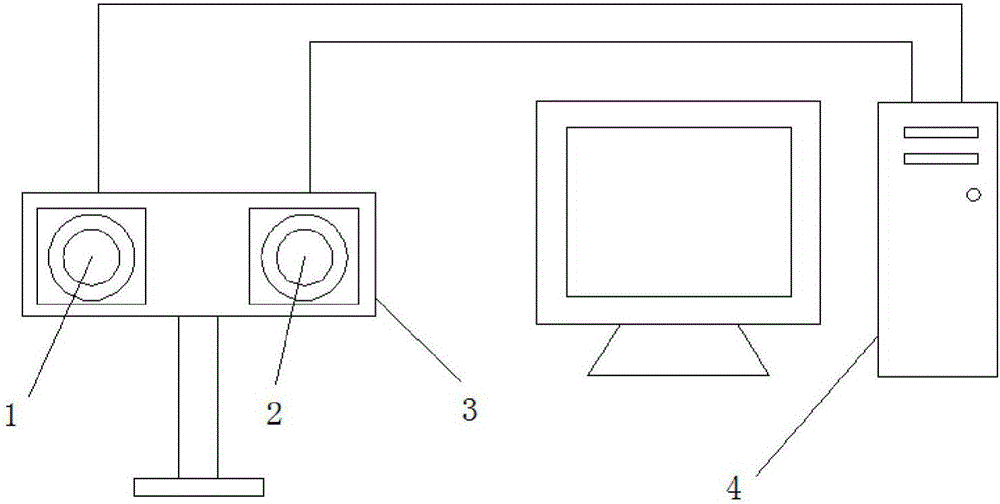
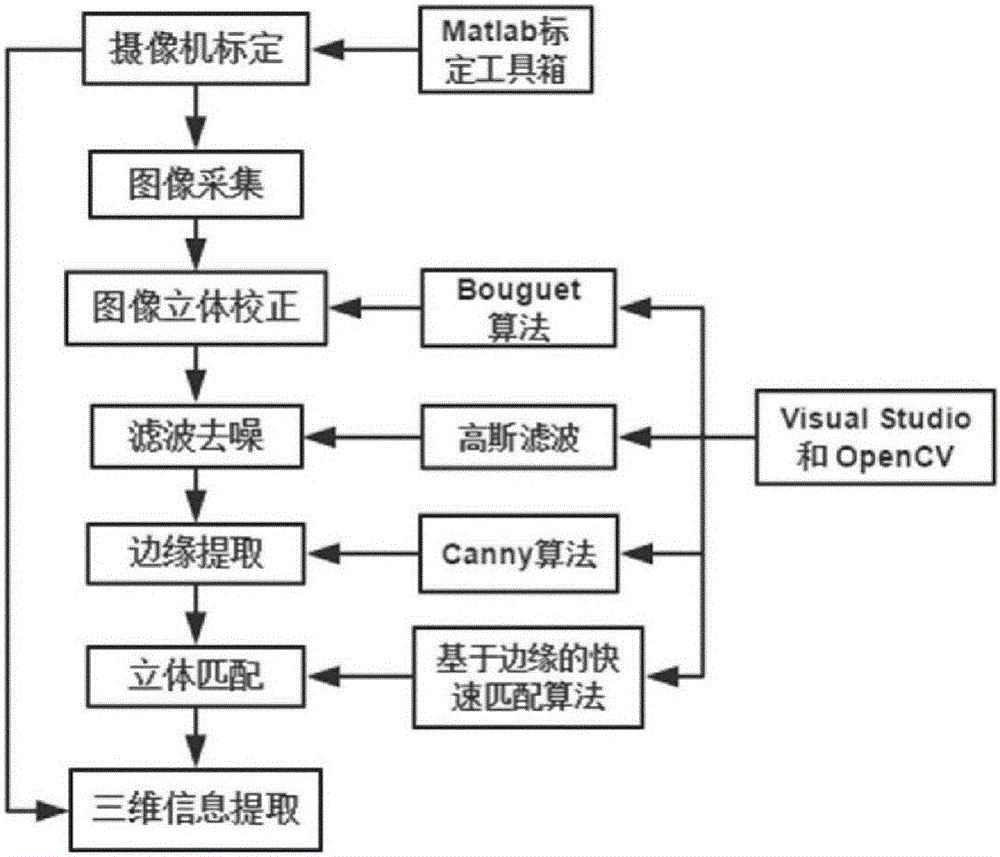
[0034] Such as figure 2 Shown, a kind of space object three-dimensional information rapid detection method based on binocular vision, adopts two cameras that are placed on the cloud platform 3 in a forward parallel manner and a PC 4 to form a binocular vision system, the left camera 1, the right camera 2 is fixed on the pan-tilt 3 in a forward parallel manner, and the two cameras are connected with the PC 4 equipped with the required programming and processing software to jointly form a binocular vision detection system (see figure 1 ). Include the following steps:
[0035] S1. Camera calibration: At present, binocular vision stereoscopic imaging models are generally divided into linear models that do not consi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More