

Stepwise indoor three-dimensional positioning method for use in multi-floor environment
A three-dimensional positioning and multi-floor technology, applied in positioning, location information-based services, nan and other directions, can solve the problems of low positioning accuracy and large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0084] Example 1: MT3 to be located is located at 3F
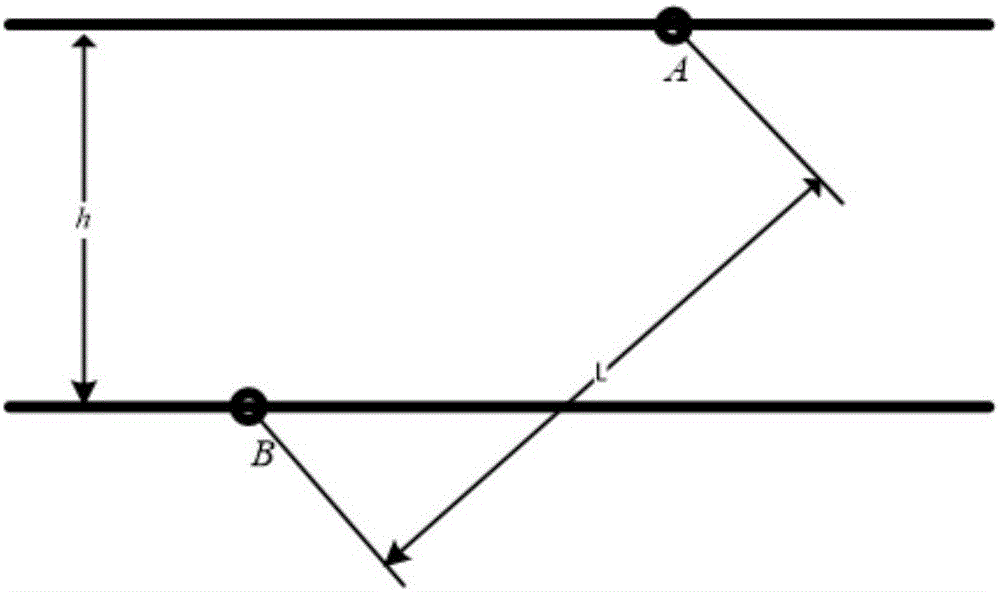
[0085] Step 1: Arrangement of AP points in Figure 4 Medium, AP i Represents the distribution of APs. The AP connections on the fourth floor are perpendicular to the floor plane of the floor, and all APs are located near the ceiling; MT i The representative locates the floor location where the MT may be located. In the figure, 1F, 2F, 3F, and 4F represent the floor number of each floor, and the floor height h of each floor is 4m; the dotted line positions of each floor in the figure are h / 2, 3h / 2, 5h / 2, 7h / 2 Represents the middle position of each floor, that is, the positions where the height values are 2m, 6m, 10m, and 14m respectively. In the case analysis and algorithm analysis measurement, the interlayer between the ceiling and the floor in the actual building is not considered.
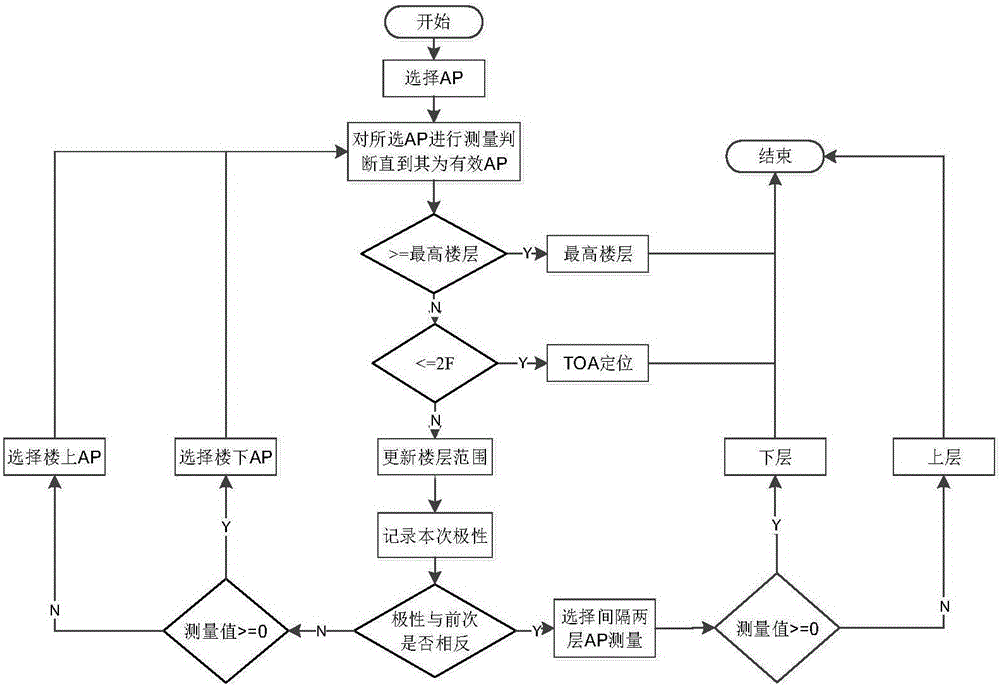
[0086] Step 2: Floor Positioning
[0087] 2.1 The connection of APs (different floors) is perpendicular to the floor plane of the flo...
Embodiment 2
[0097] Example 2: The MT4 to be located is located at 4F, and the AP setting on the floor is the same as the Figure 4 same
[0098] Step 1: Arrangement of AP points in Figure 4 Medium, AP i Represents the distribution of APs. The AP connections on the fourth floor are perpendicular to the floor plane of the floor, and all APs are located near the ceiling; MT i The representative locates the floor location where the MT may be located. In the figure, 1F, 2F, 3F, and 4F represent the floor number of each floor, and the floor height h of each floor is 4m; the dotted line positions of each floor in the figure are h / 2, 3h / 2, 5h / 2, 7h / 2 Represents the middle position of each floor, that is, the positions where the height values are 2m, 6m, 10m, and 14m respectively. In the case analysis and algorithm analysis measurement, the interlayer between the ceiling and the floor in the actual building is not considered.
[0099] Step 2: Floor Positioning
[0100] 2.1 The connection ...
Embodiment 3
[0108] Step 1: Arrangement of AP Points
[0109] exist Figure 5 , the AP connection on the fourth floor is not perpendicular to the floor plane of the floor; the meanings of the rest of the symbols in the figure are the same as Figure 4 same. In the third embodiment, the to-be-located MT3 is located at 3F.
[0110] Step 2: Floor Positioning
[0111] 2.1 The connection of AP (different floors) is not perpendicular to the floor plane of the floor (such as Figure 5 );
[0112] 2.2 Select two AP points AP3 and AP4 for judgment, d=3.76m, the distance L between the two APs is 5.7074m, and the floor height h is 4m. Then it is calculated that it does not satisfy the relation Therefore, it is necessary to re-select a group of APs on the two floors for re-judgment;
[0113] 2.3 Since AP3 and AP4 do not satisfy the relational expression Re-select the AP points that can be detected for judgment:
[0114] 2.3.1 Select two AP points AP5 and AP6 for judgment, d=4.31m, the dista...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More