

Servo system inertia identification method adopting genetic algorithm for optimization
A genetic algorithm and servo system technology, applied in control systems, electronic commutation motor control, electrical components, etc., can solve problems such as the contradiction between convergence speed and identification accuracy, and the identification results have a greater impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
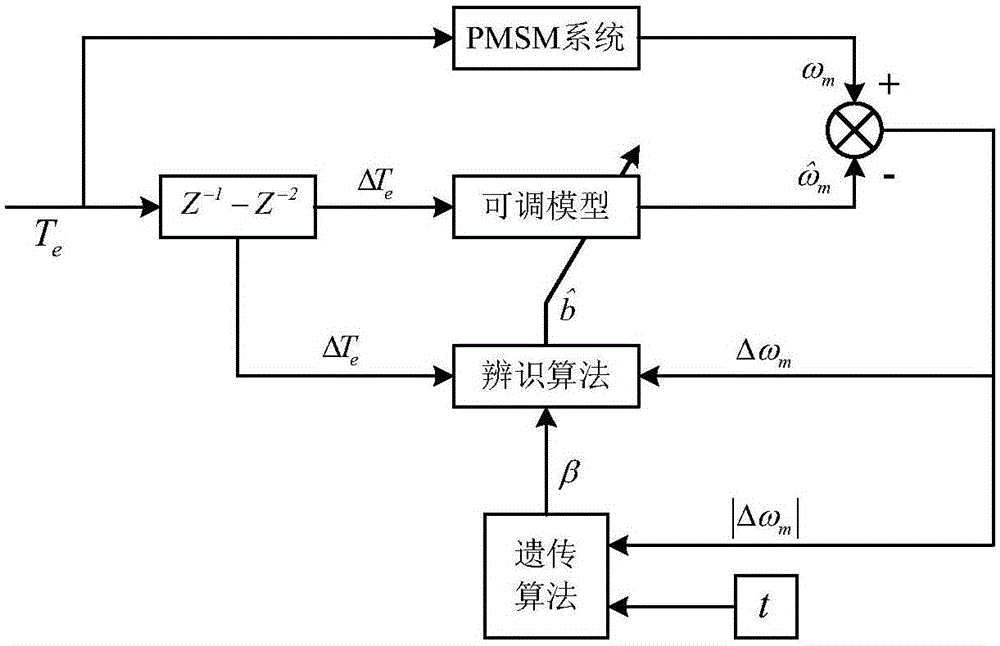
[0052] Such as figure 1 As shown, a servo system inertia identification method optimized by a genetic algorithm of the present invention is based on the model reference adaptive theory, and the adaptive law of inertia identification is designed according to the Landau discrete-time recursive algorithm. Using the global search ability of genetic algorithm, the model reference adaptive system is used as the control object, the output deviation between the actual angular velocity and the estimated angular velocity of the motor is used as the control error, and the time multiplied by the absolute value of the error is used as the optimization target to dynamically adjust the inertia identification The adaptive gain β in , realizes the online optimization of the control parameters. The specific implementation is as follows:
[0053] Based on the model reference adaptive theory, an inertia identification system is established. The equation containing parameters to be estimated is u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More