

Track planning method for multi-unmanned plane system in three-dimensional environment
A multi-UAV, track planning technology, applied in three-dimensional position/channel control, control/regulation system, non-electric variable control and other directions, it can solve the problem that the artificial potential field law is easy to fall into the local optimum, and the heuristic function limits the global optimum. issues of superiority
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
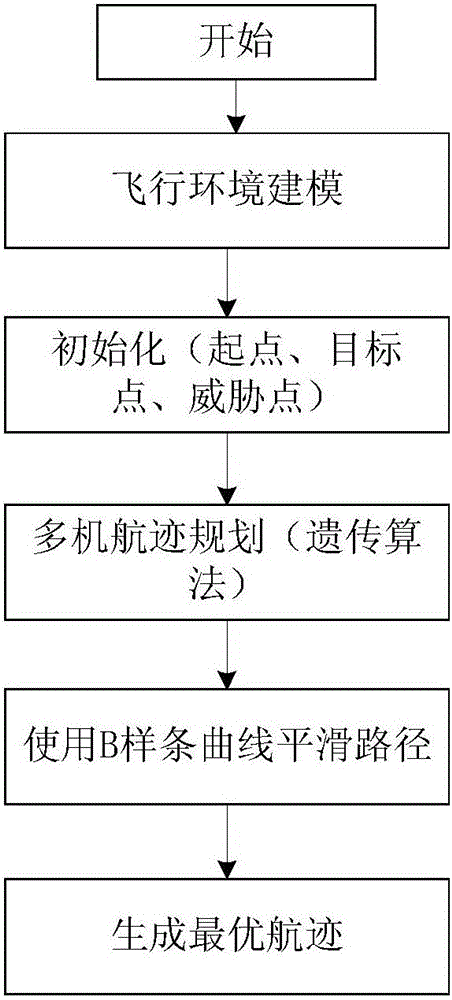
[0043] figure 1For the flow chart of the present invention's realization step, the inventive method is as follows:
[0044] Step 1: Modeling of the flight environment.
[0045] The natural boundaries in the region are complex. Firstly, the convex hull calculation is performed on the complex obstacle boundaries of the digital map, and the obtained convex hull is used to approximate the obstacle area to reduce the complexity of the environment modeling.
[0046] The three-dimensional space of UAV flight is expressed as {(x, y, z)|0≤x≤X max , 0≤y≤Y max , 0≤z≤Z max}, where X max , Y max ,Z max are the upper bounds of the three directions of x, y, and z in the three-dimensional space, respectively. Track planning needs to encode the search space....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More