

Robot motion generation method based on physics engine
A technology of physics engine and robot, applied in the field of robot action generation based on physics engine, can solve the problems of low efficiency and achieve the effect of improving efficiency and no cumulative error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
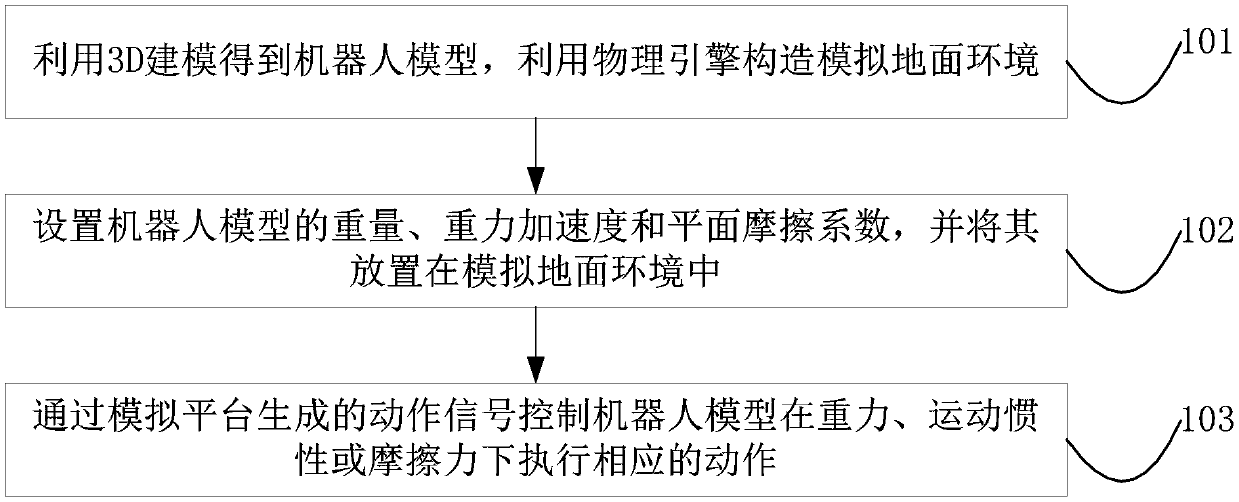
[0018] Embodiments of the present invention provide a method for generating robot actions based on a physics engine, such as figure 1 shown, including the following steps:
[0019] Step 101, use 3D modeling to obtain a robot model, and use a physics engine (such as Havok and PhysX) to construct a simulated ground environment.
[0020] Step 102, setting the weight, acceleration of gravity and plane friction coefficient of the robot model, and placing it in the simulated ground environment.
[0021] Step 103, control the robot model to perform corresponding actions under gravity, motion inertia or friction through the action signal generated by the simulation platform.
[0022] Multiple robot models are placed in the same simulated ground environment. The aforementioned robot models include, but are not limited to: hexapod walking robots, ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More