

Free-floating space manipulator modeling method under condition of considering spacial flexible deformation of arm lever
A technology of space manipulator and modeling method, which is applied in special data processing applications, instruments, electrical digital data processing, etc., and can solve problems such as only considering the flexible deformation of the arm in the motion plane
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
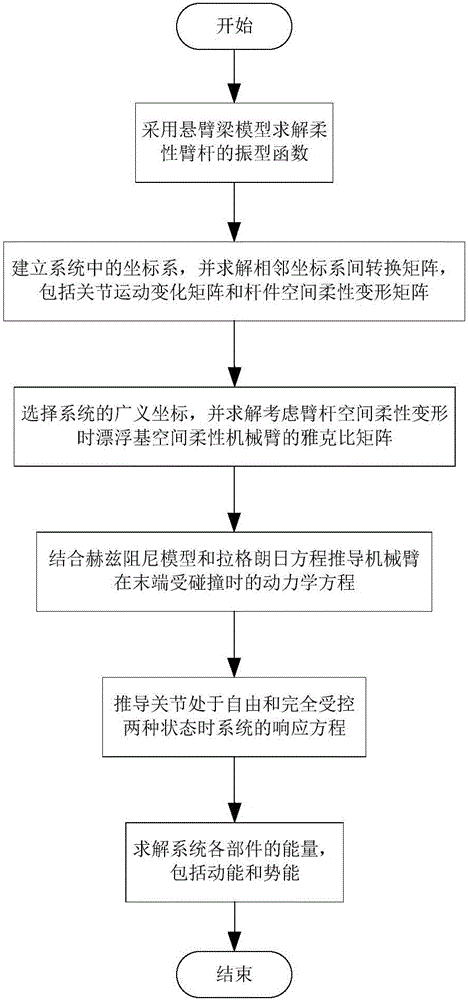
[0147] According to the kinematics and dynamics modeling method of a floating-based space manipulator considering the space flexible deformation of the arm provided by the present invention, as Figure 3-4 The shown double-link flexible manipulator is verified as the research object, and the relevant parameters of the manipulator are shown in Table 2.
[0148] Table 2 Parameters of the flexible manipulator system
[0149]
[0150] In the table, ρ i is the linear density of member i, m b is the mass of the base, l 1 and l 2 is the length of the member, E i is the elastic modulus of member i.
[0151] The kinematics model, dynamics model, Jacobian matrix, solution of the kinetic energy and potential energy of the flexible arm of the flexible arm are deduced by the method described in the manual. It is set that during the collision process, the joints are always in a locked state, and the robot system is in a static state at the initial moment of the collision of the rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More