

Control method of bionic snake-shaped robot
A control method and robot technology, applied in the field of bionics, can solve the problems of snake-shaped robot with many degrees of freedom, huge calculation amount of gait planning, and difficult implementation, so as to enhance real-time and controllability, and avoid dynamic calculation and construction. mode, the effect of overcoming the lack of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
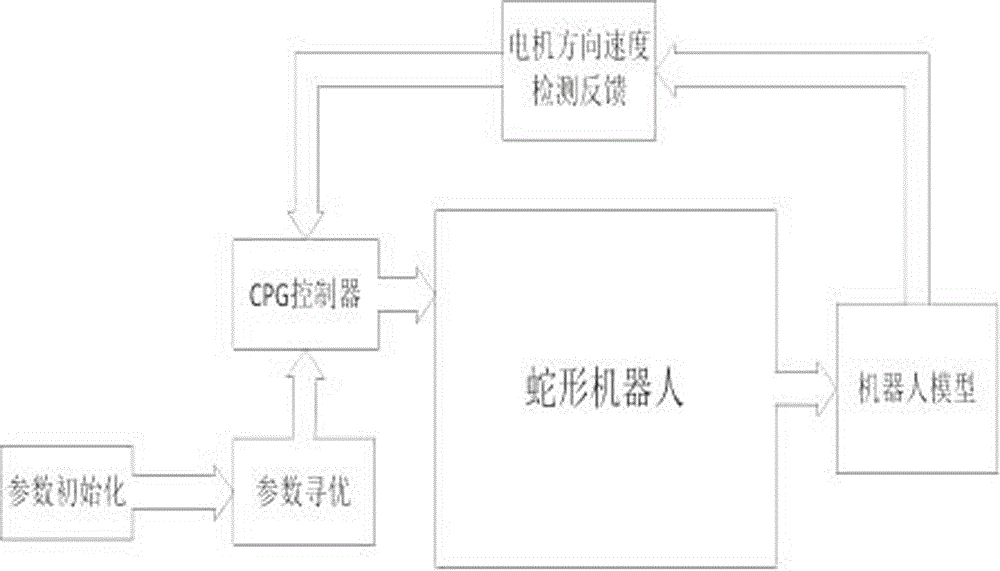
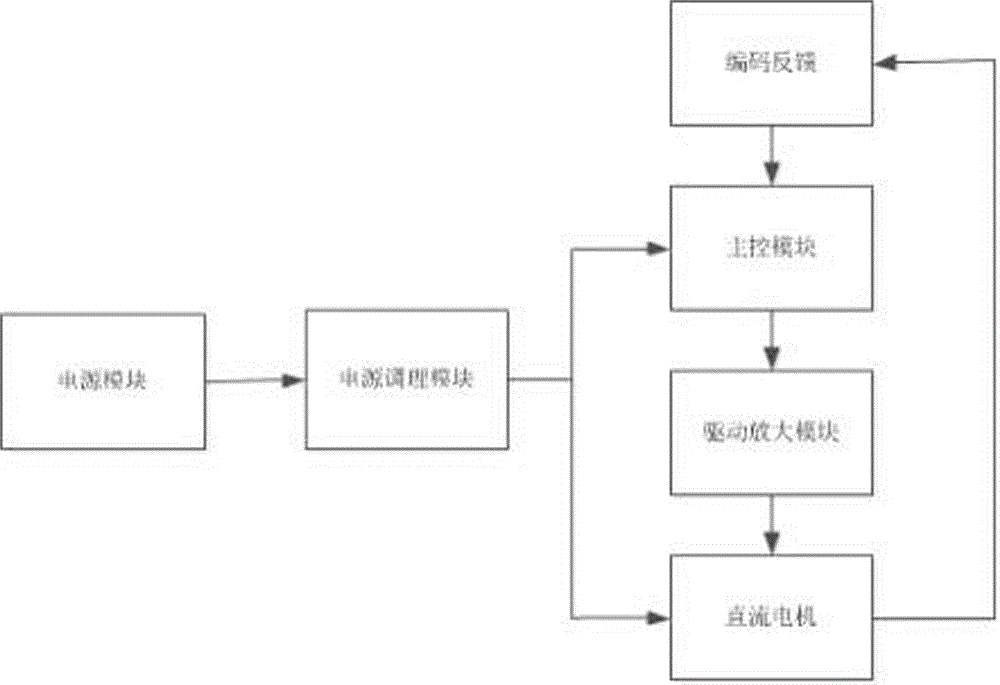
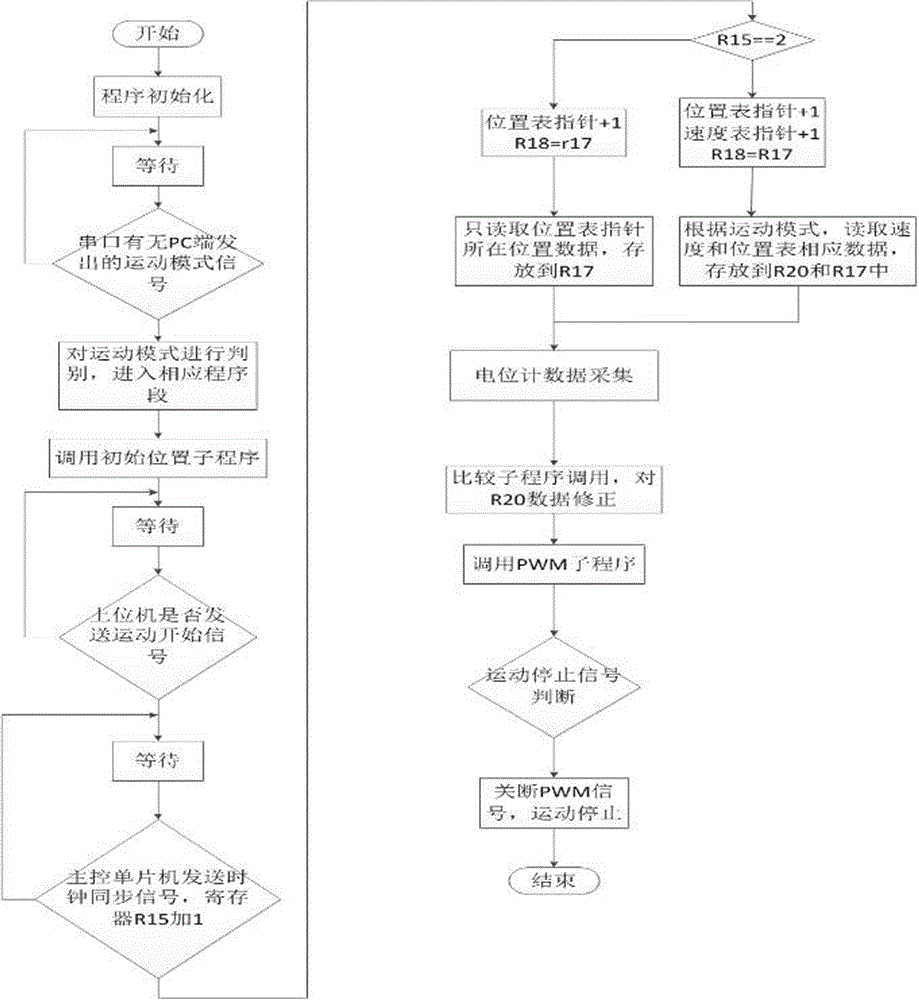
[0017] see Figure 1-3 , a bionic snake-like robot control method, first obtain the CPG mathematical model of the bionic snake-like robot through the co-simulation of the electromechanical system, and then use the periodic oscillation signal generated by the CPG mathematical model for the robot joint gait control and gait mode switching control Its rhythmic motion behavior is controlled, and the unilateral and opposite side link weights in the CPG network are iteratively optimized through the GA genetic algorithm, and the motor direction and speed are fed back in real time through the potentiometer. The output is adjusted with feedback.
[0018] The control mathematical model of the bionic snake-like robot and the construction of the external environment are obtained through electromechanical co-simulation, which is obtained on the basis of establ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More