

Inertial acceleration assisted receiver tracking loop algorithm
A tracking loop and acceleration technology, applied in the field of navigation, can solve problems such as the contradiction between the dynamic performance of the tracking loop and the bandwidth requirement, and achieve the effect of improving the anti-interference ability, improving the dynamics, and improving the dynamic range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
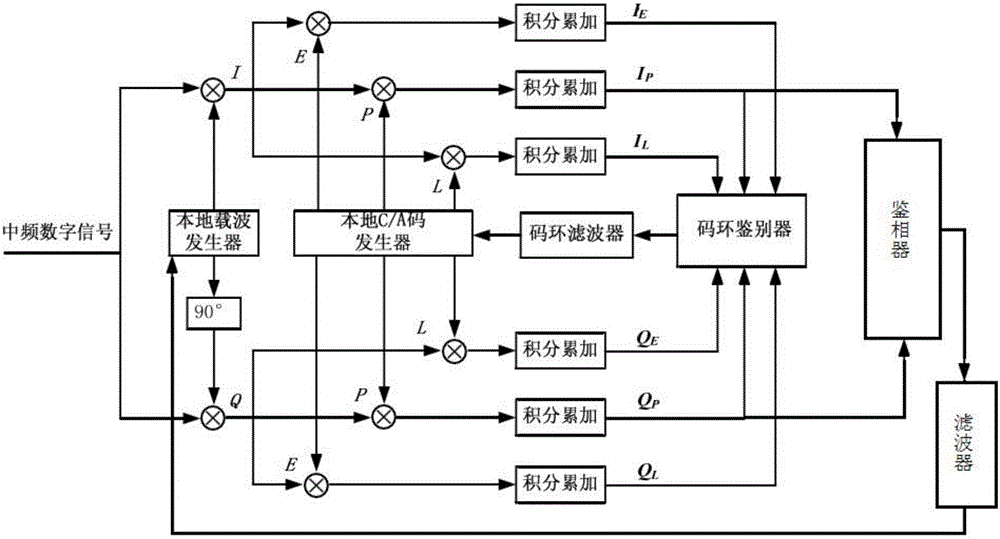
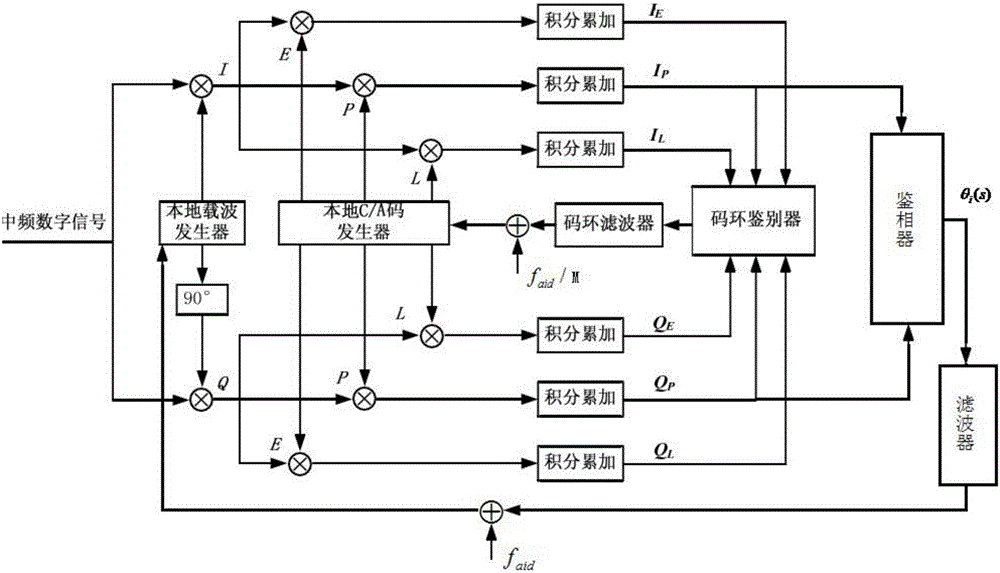
[0040] An inertial navigation acceleration-assisted receiver tracking loop algorithm is developed in such as figure 2 The shown inertial navigation accelerometer is implemented on the tracking loop of the assisted receiver, including the following steps:
[0041] The digital intermediate frequency signal after A / D conversion is mixed to obtain the I-channel signal in the same direction and the orthogonal Q-channel signal, which are respectively correlated with the lead code E, the real-time code P, and the lag code L to obtain the stripped carrier and pseudo-random code. The six-way signal: the same direction leading signal I E , same direction instant signal I P , with the lagging signal I L , the quadrature lead signal Q E , the quadrature instant signal Q P , the quadrature lag signal Q L . Co-directional leading signal I E , same direc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More