

Multifunctional manipulator
A multi-functional manipulator and arm technology, applied in the field of machinery, can solve the problems of damage to goods, simple structure of anti-loose mechanical gripper, low mechanical strength of mechanical gripper, etc., to prevent falling, high degree of automation and high mechanical strength Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
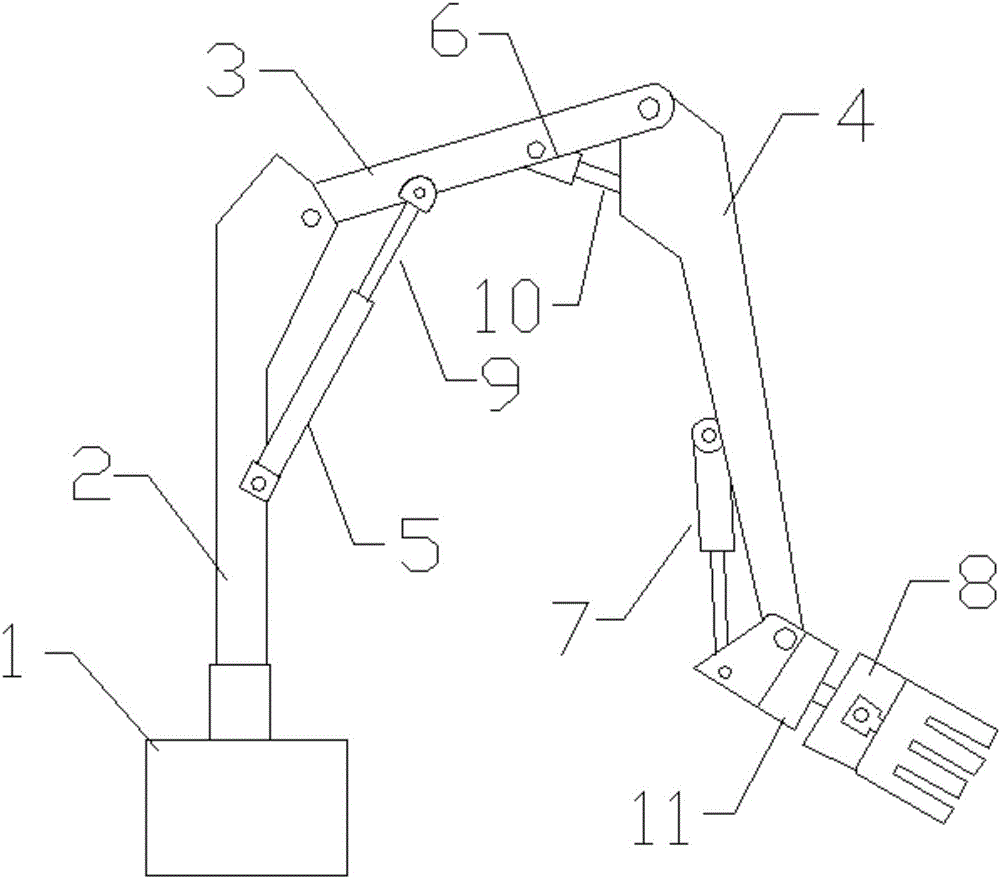
[0021] according to figure 1 As shown, a multifunctional manipulator includes a base 1, a column 2, a horizontal arm 3, a vertical arm 4, a lifting hydraulic cylinder 5, a swing hydraulic cylinder 6, a pitching hydraulic cylinder 7 and a gripper device 8, and the column 2 is welded to the base 1, the horizontal arm 3 is hinged to the column 2, the vertical arm 4 is hinged to the horizontal arm 3, the column 2 is provided with a lifting hydraulic cylinder 5, and the lifting hydraulic cylinder 5 is connected with the piston rod 9 The horizontal arm 3 is connected, and the vertical arm 4 is hinged on the horizontal arm 3. A swing hydraulic cylinder 6 is arranged at the end of the horizontal arm 3. The swing hydraulic cylinder 6 is connected to the vertical arm 4 through a swing rod 10. The vertical arm 4, a gripper device 8 is arranged below, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More