

Unmanned aerial vehicle/motor control device and method
A technology of motor control and control information, applied in the field of motor control devices and unmanned aerial vehicles, can solve the problems of large space occupied by the motor control circuit printed circuit board, poor system stability, low communication efficiency, etc., to achieve control frequency and accuracy Does not slow down, improves speed and stability, reduces the effect of hardware size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
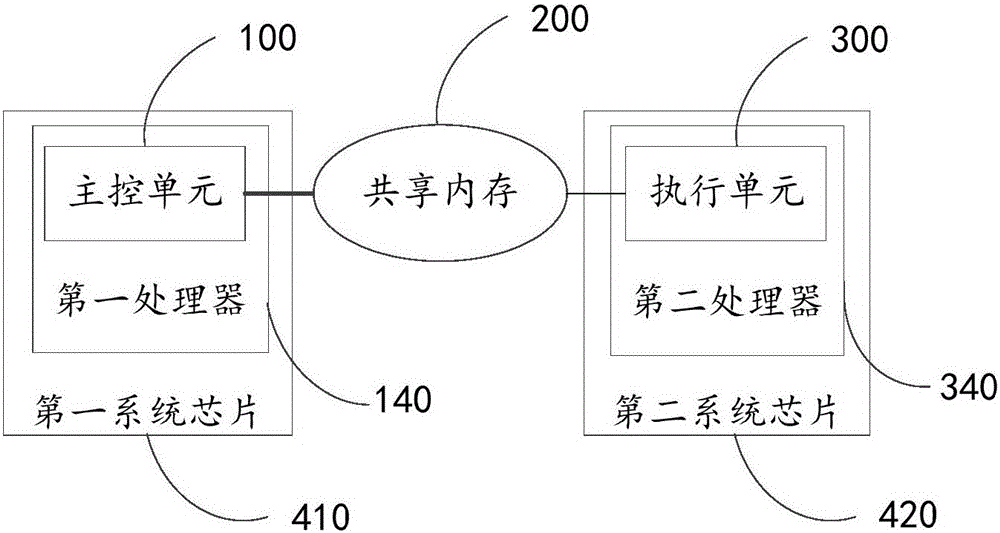
[0024] figure 2 A structural block diagram of the motor control device provided by the embodiment of the present invention is shown, and the motor control device provided by the embodiment of the present invention is used to adjust the load to a target attitude by controlling one or more motors on the load. The motor control device provided in the embodiment of the present invention includes: a main control unit 100 , a shared memory 200 and an execution unit 300 , the main control unit 100 is set in the first processor 140 , and the execution unit 300 is set in the second processor 340 , and the first processor 140 , the shared memory 200 and the second processor 340 may be integrated on the first system chip 410 . Data interaction between the main control unit 100 and the execution unit 300 is realized through the shared memory 200 .
[0025] Such as image 3 As shown, in another embodiment, the first processor 140 may be disposed on the first system chip 410 , and the se...
no. 2 example
[0048] Figure 7 A flow chart of the motor control method provided by the embodiment of the present invention is shown. The motor control method provided by the embodiment of the present invention includes the following steps:
[0049] In step S1, the current operating parameter information of one or more motors on the load is obtained and stored in the shared memory.
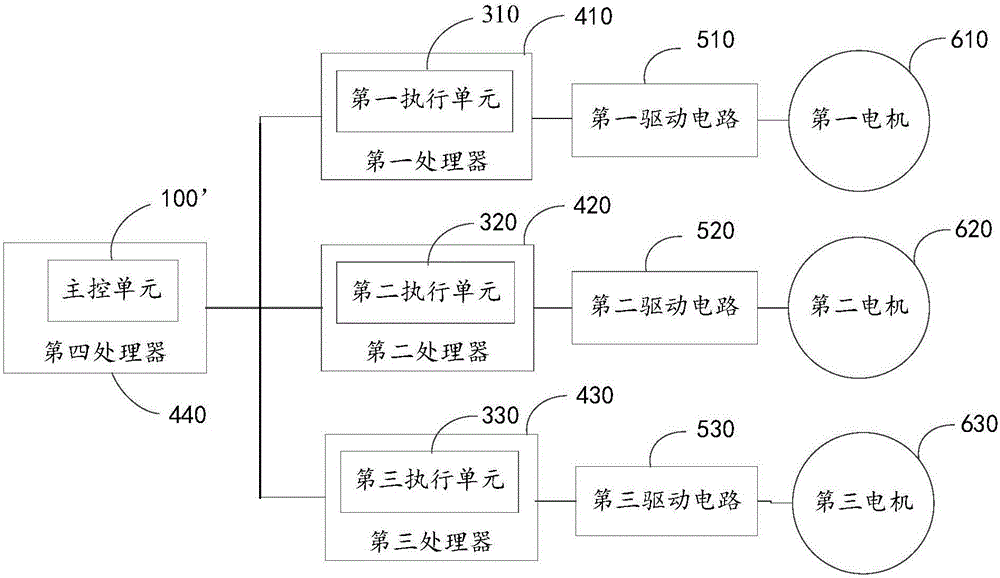
[0050] In the embodiment of the present invention, step S1 may be implemented by the execution unit 300 . The current operating parameter information of the motor includes: the power of the motor, the frequency of the motor, the voltage and current of the motor, and the current angle data of the motor, etc., wherein the current angle data of the motor may include the electrical angle of the rotor of the motor. The first motor 610, the second motor 620, and the third motor 630 are all equipped with magnetic encoders, which can obtain the electrical angle of the motor rotor at any time, and then, the execution ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More