

Four-freedom-degree series-parallel minimally invasive surgery manipulator
A minimally invasive surgery and manipulator technology, applied in the field of robotics, can solve the problems of large volume, cumbersome control, and complex structure of surgical robots, and achieve the effect of improving surgical accuracy, high safety, and high rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
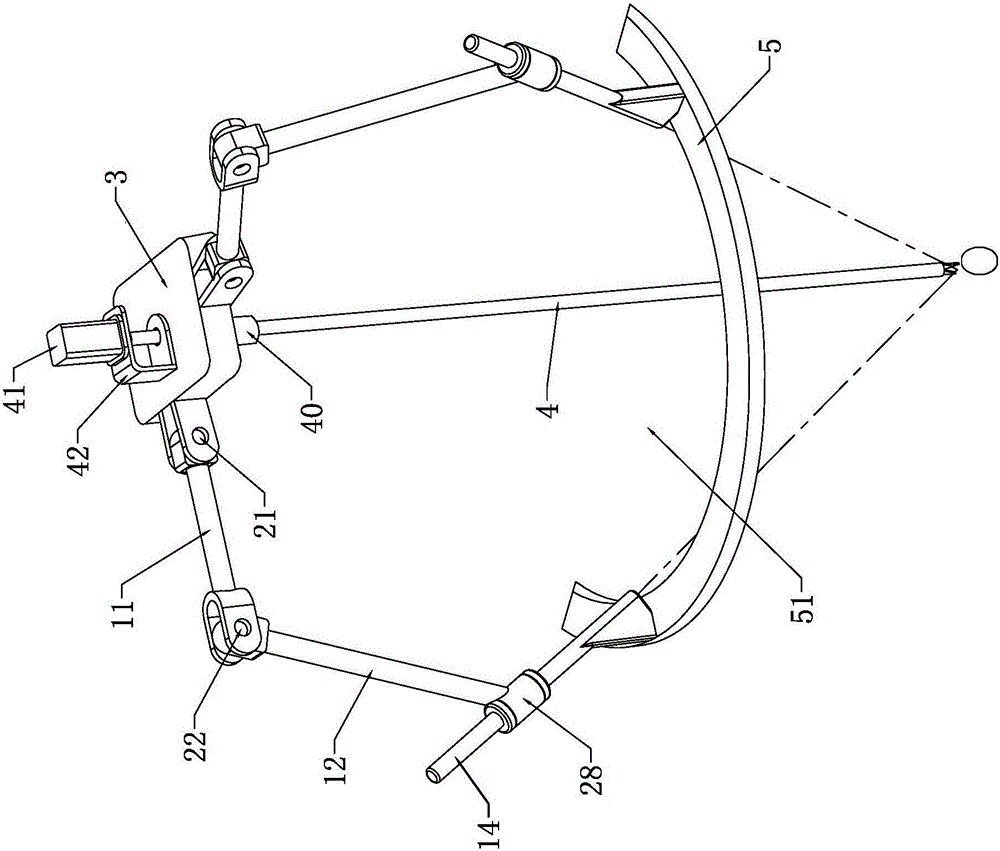
[0019] Such as figure 1 As shown, a hybrid manipulator for minimally invasive surgery includes a moving platform 3, a base 5, a surgical module and two branches of the driving surgical module.
[0020] The surgical module is rotatably positioned on the moving platform, including a surgical tool 4 and a motor 41 for driving the surgical tool to rotate, and the surgical tool is rotatably positioned on the moving platform through a sleeve 40; the surgical tool is generally a laparoscope Apparatus (referring to incisor, separating forceps, flusher, endoscope specifically); Described motor is fixed on the moving platform by support 42, and the rotation axis of motor is the operation module rotation axis, simultaneously, the rotation axis of motor and operation The longitudinal axis of the tool is coaxial; the base is an arc-shaped base located under the moving platform, and the lower end of the surgical tool passes through the semi-enclosed area 51 in the middle of the base and the...
Embodiment 2
[0025] Such as figure 1 As shown, a hybrid manipulator for minimally invasive surgery includes a moving platform 3, a base 5, a surgical module and two branches of the driving surgical module.
[0026] The surgical module is rotatably positioned on the moving platform, including a surgical tool 4 and a motor 41 for driving the surgical tool to rotate, and the surgical tool is rotatably positioned on the moving platform through a sleeve (omitted in the figure); the surgical tool Generally, it is a laparoscopic instrument (specifically referring to an incision knife, a separating forceps, a flushing device, and an endoscope); the motor is fixed on the moving platform by a support 42, and the rotation axis of the motor is the rotation axis of the operation module. The rotation axis is coaxial with the longitudinal axis of the surgical tool; the base is an arc-shaped base located below the moving platform, and the lower end of the surgical tool passes through the semi-enclosed are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More