Robot remote control method based on ROS operating system and remote control system thereof
An operating system and remote control technology, applied in the field of robotics, can solve the problem that the operating system cannot meet the needs of practical applications, and achieve the effects of small trajectory motion deviation, high positioning accuracy, and high degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
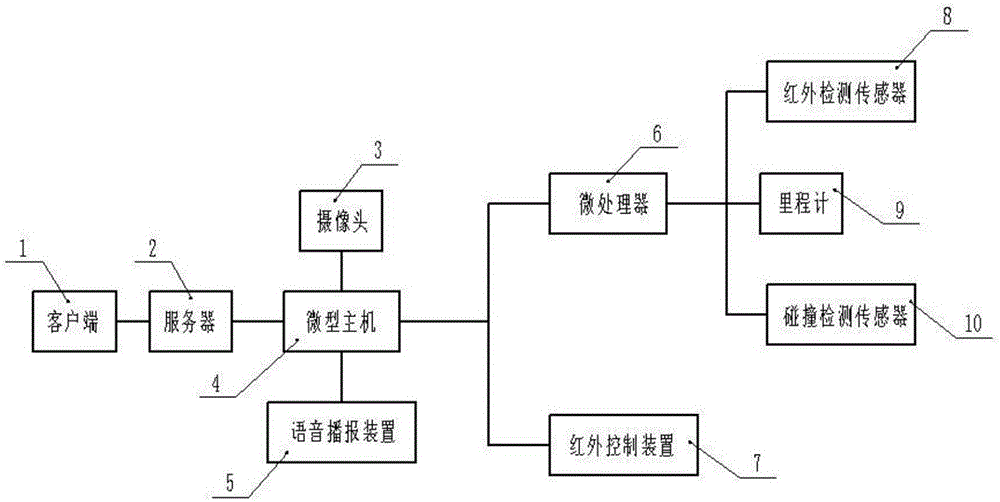
[0029] Such as figure 1 As shown, the present invention provides a kind of robot remote control method based on ROS operating system of the present invention, comprises the steps:
[0030] Step (1), install the ROS operating system in the micro-host 4, use the camera 3 data collected by the xtion (ASUS depth camera) in the ROS operating system to generate two-dimensional point cloud data, and use the gmapping (navigation drawing) framework and particle filter Locally optimize the algorithm to establish a two-dimensional navigation map; or manually draw a two-dimensional navigation map, and import the two-dimensional navigation map into the ROS operating system in the micro-host 4, and finally store the two-dimensional navigation map in the background of the server 2;
[0031] Step (2), press and hold the voice button of the client 1 to input the voice command, and transmit the voice command to the server 2, the server 2 obtains the location information in the voice command after...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com