

Dynamic positioning method of underwater detection and working robot
A technology for underwater robots and working robots, applied in the field of robotics, can solve the problems of easy oscillation, poor convergence, slow ships approaching the target point, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
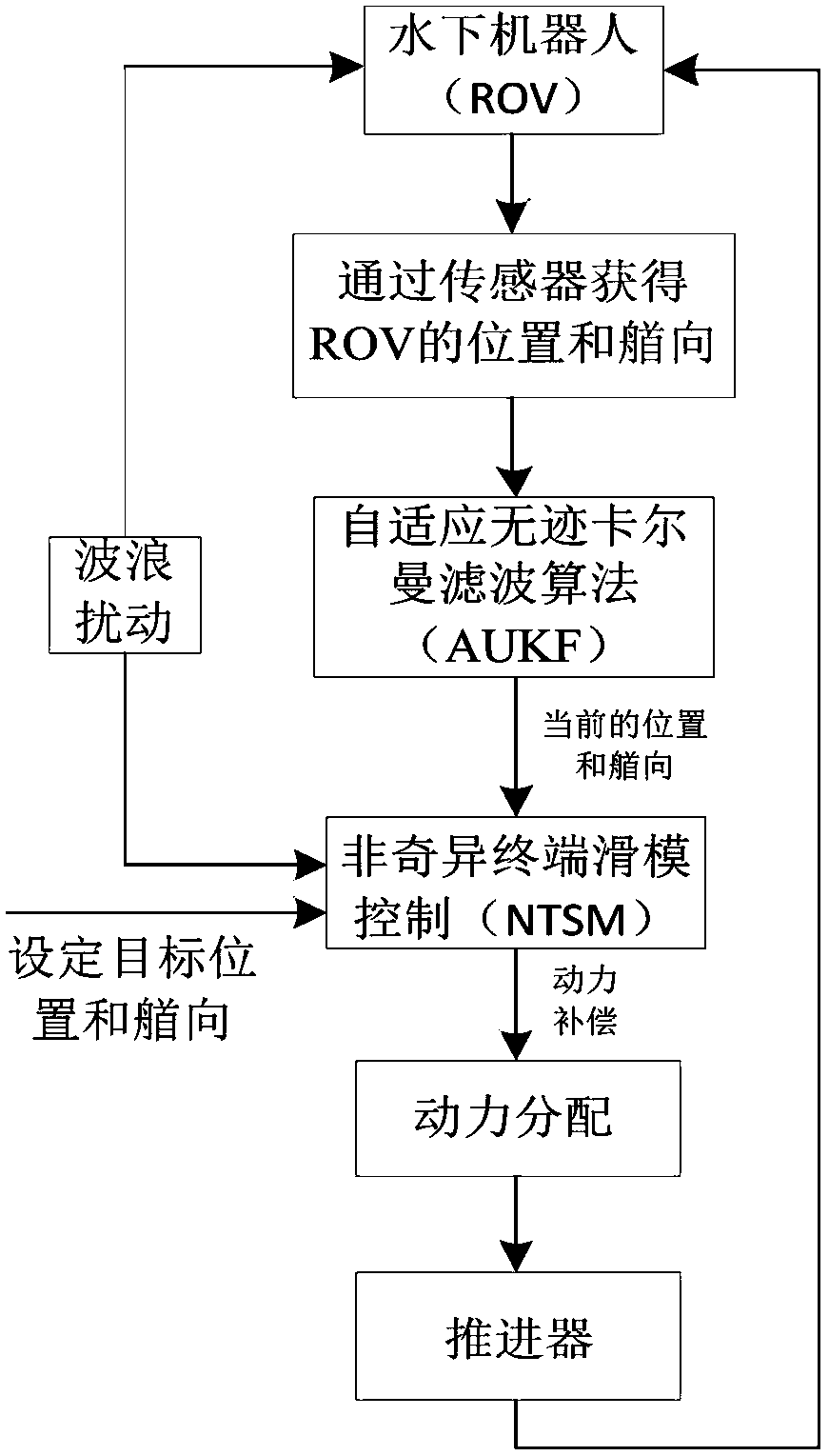
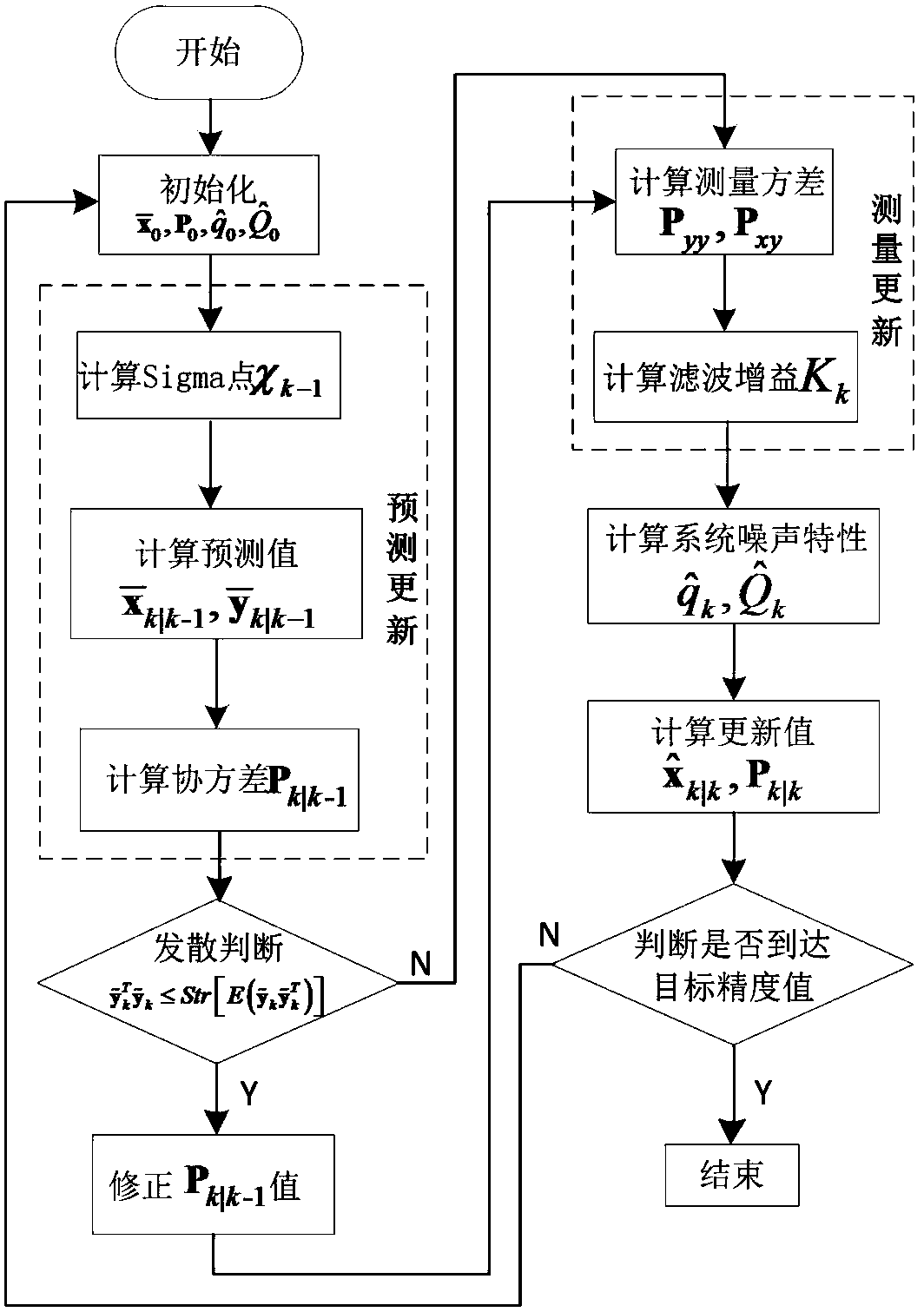
[0106] Since the positioning ability of the underwater robot is greatly affected by environmental disturbances, in order to solve this problem, the present invention adopts an adaptive unscented Kalman filter algorithm (AUKF). Compared with other filtering algorithms, the self-adaptive unscented Kalman filtering algorithm adopted in the present invention has a better tracking and filtering effect under the influence of factors such as external interference, acceleration physical characteristics and human manipulation, and the uncertainty model It has good robustness and high accuracy of state estimation.
[0107] The present invention will be described in further detail below in conjunction with the accompanying drawings. Such as figure 1 , figure 2 Shown is the algorithm flow chart of the dynamic positioning system of the underwater robot based on the adaptive unscented Kalman filter state observer and the non-singular terminal sliding mode controller, and describes the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More