

Hemiplegia Rehabilitation External Skeleton Robot
A technology for robots and hemiplegia, applied in passive exercise equipment, equipment to help people walk, physical therapy, etc., can solve the problems of heavy footwork device structure, hard-coded parameters, low comfort, etc., and achieve flexible setting of parameters and function selection , Reduce the weight of the device and fit the size of the foot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
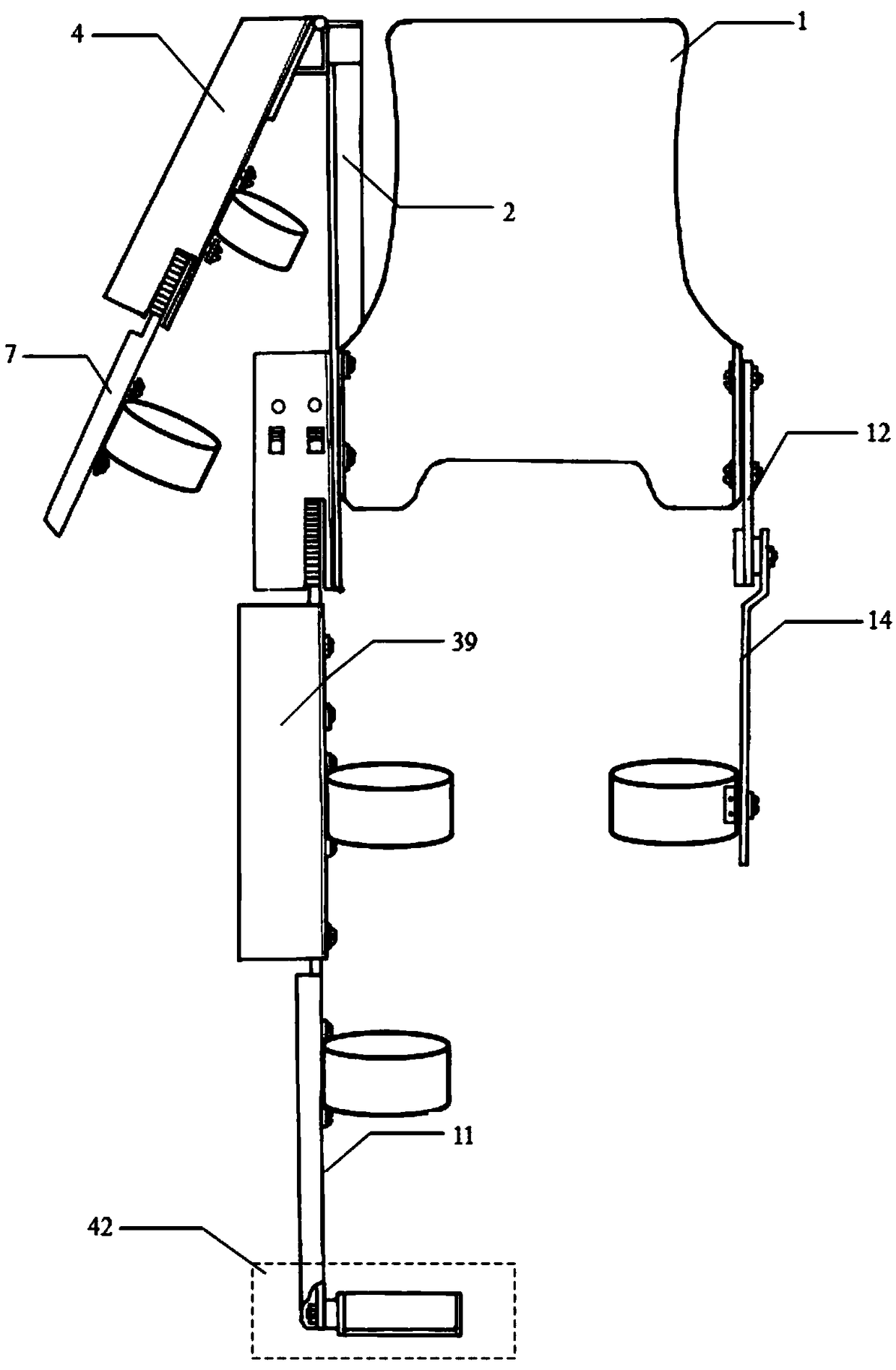
[0062] Such as figure 1 As shown, the present invention discloses a hemiplegia rehabilitation exo-skeletal robot, which is mainly composed of a back fixing device 1, an upper limb support 2, an upper arm 4, a forearm 7, a thigh 39, a lower leg 11, a step device 42 and the arm connected by a normal leg angle sensor 12 and the normal leg angle sensor transmission arm 14 of the normal side lower limb assembly.
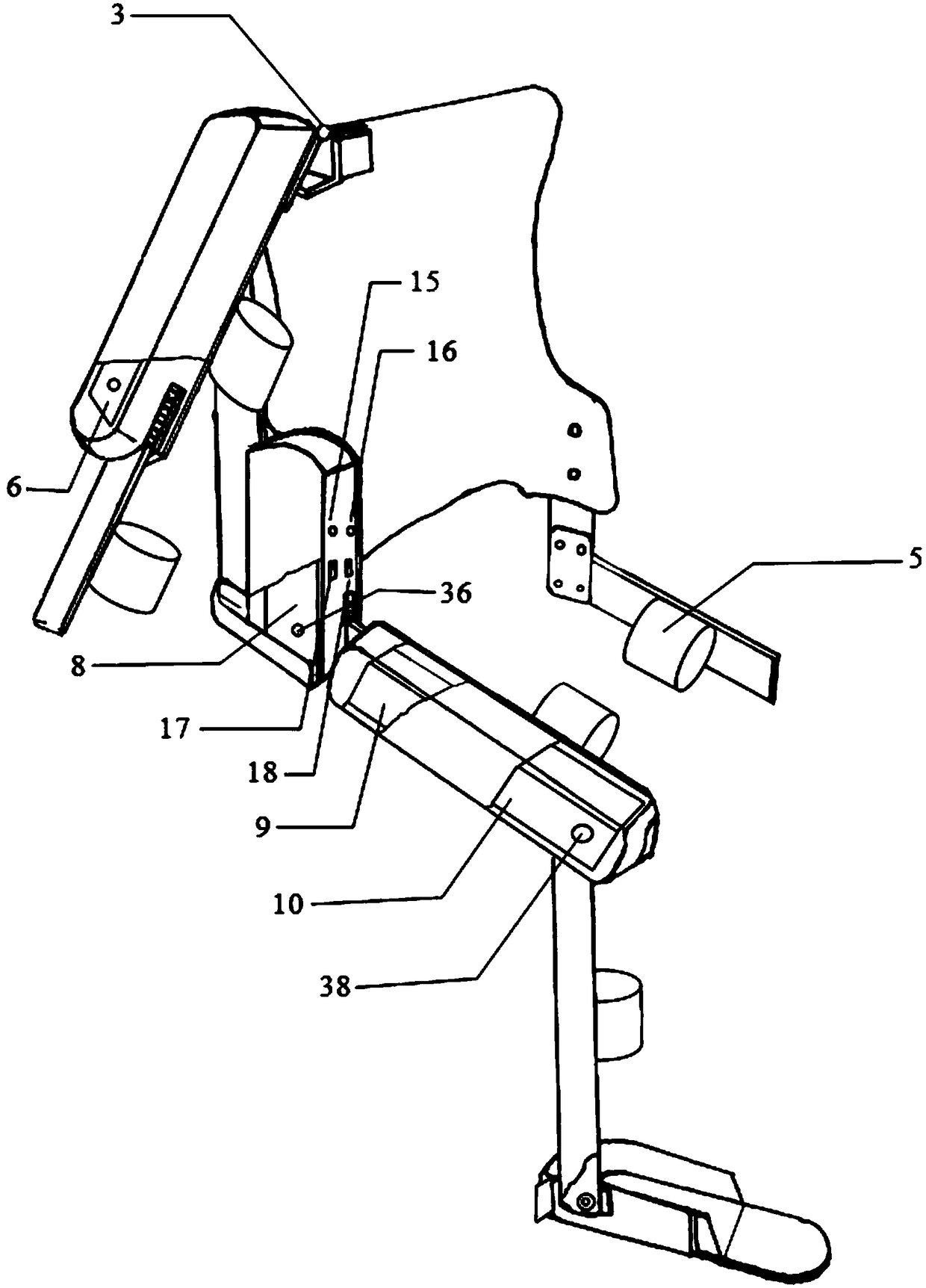
[0063] Such as figure 1 with figure 2 As shown, the upper limb support 2, upper arm 4, forearm 7, thigh 39, lower leg 11 and foot device 42 are all located on one side of the back fixing device 1. Wherein, the upper end of the upper limb support 2 is hinged with the shell of the upper arm 4 through the upper arm rotating shaft 3 to realize the swing of the upper arm. An elbow joint driving device 6 is fixedly installed at the lower end of the inner shell of the upper arm 4, and the power output end of the elbow joint driving device 6 is keyed to the forearm 7 to realize the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More