

Method for building semantic map for domestic robot and system
A technology of semantic maps and robots, applied in instruments, 3D modeling, image enhancement, etc., to achieve the effect of convenient operation, easy implementation, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
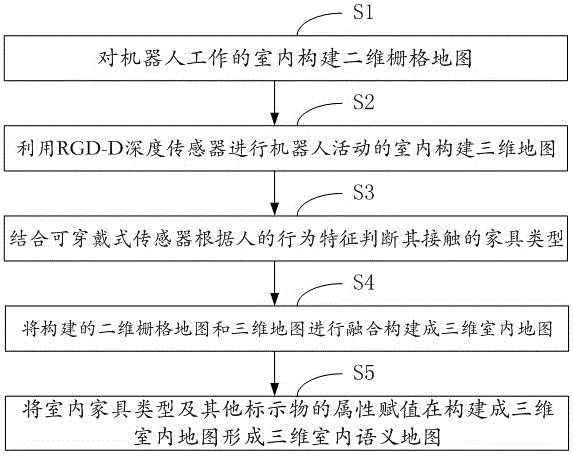
[0029] figure 1 A flow chart of a method for building a semantic map by a household robot provided by the present invention is shown, which is described in detail as follows:
[0030] Step S1, build a two-dimensional grid map for the indoor where the robot works; when the robot is placed in its working place, the robot is not familiar with its workplace, so it is necessary to make a recognition map for the robot in the workplace, In making the map, the robot uses the laser rangefinder to make a two-dimensional grid map of the construction room.
[0031] Step S2, use the RGD-D depth sensor to build a three-dimensional map of the robot's activities indoors; in actual use, only in a three-dimensional environment can the robot know the specific positions of doors, windows, etc., so it is necessary to use the RGD-D depth sensor to monitor the working environment The construction of the three-dimensional map of the place is mainly done through the Kinect camera.
[0032] Step S3, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More