

Lane changing collision avoidance control method with multiple modes and based on wire control steering
A technology of wire-controlled steering and control methods, which is applied to steering mechanisms, control devices, driver input parameters, etc., can solve problems such as insufficient human-machine coordination, lack of intelligence, and driver conflicts, and achieve improved pertinence and efficiency. Practicality, improved intelligence, and more reliable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings.
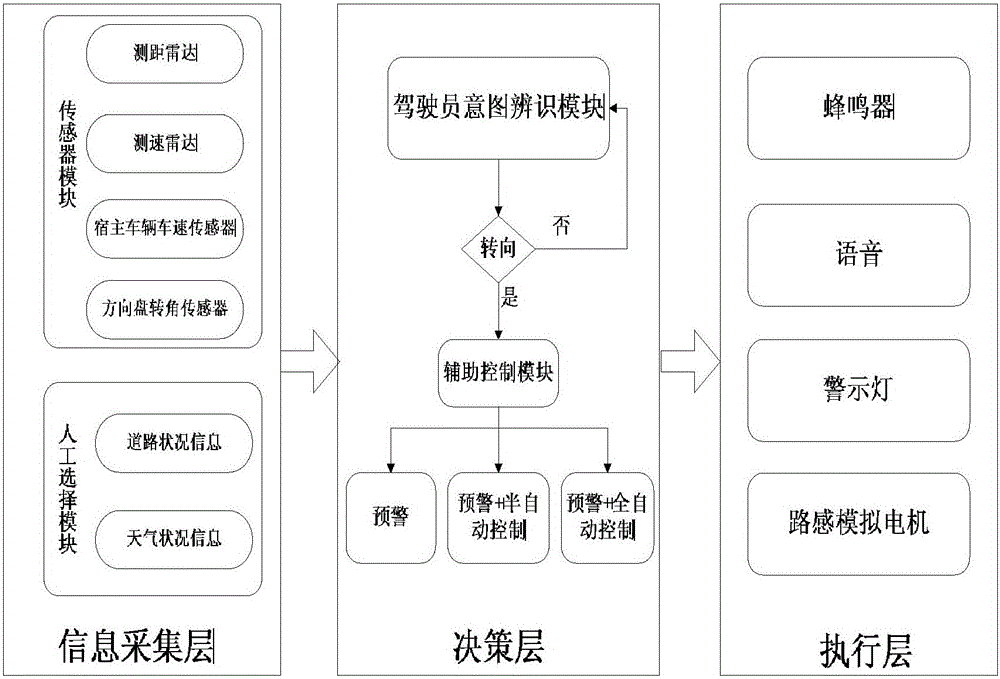
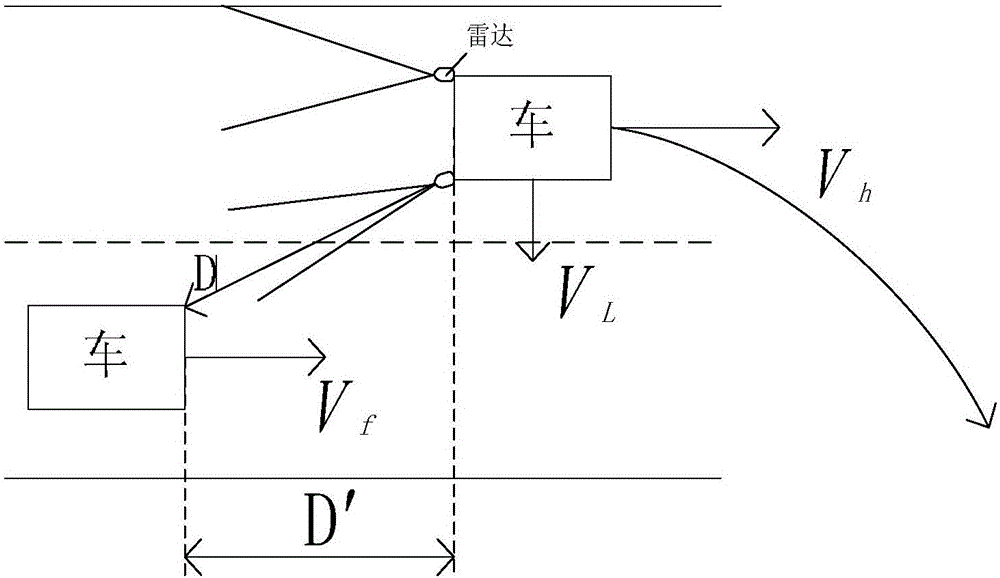
[0030] refer to figure 1 with figure 2 , the entire control system includes an information collection layer, a decision-making layer, and an execution layer; the information collection layer includes a sensor module and a manual selection module; the decision-making layer includes a driver's steering intention recognition module and an auxiliary control module; , auditory, visual human-computer early warning interaction interface. The sensor module includes a speed measuring radar, a ranging radar, a host vehicle speed sensor, and a steering wheel angle sensor, which are respectively used to measure the distance D between the host vehicle and the vehicle behind the target lane, and the vehicle speed V of the vehicle behind the target lane. f ;, host vehicle speed V h and the steering wheel angle θ; the manual selection module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More