

Underwater topographic mapping and correcting method adopting AUV (autonomous underwater vehicle) equipped with multi-beam sonar
An underwater topography and multi-beam technology, applied in surveying and navigation, surveying devices, cross-section drawing, etc., can solve problems such as unrealistic topography and landform surveying operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
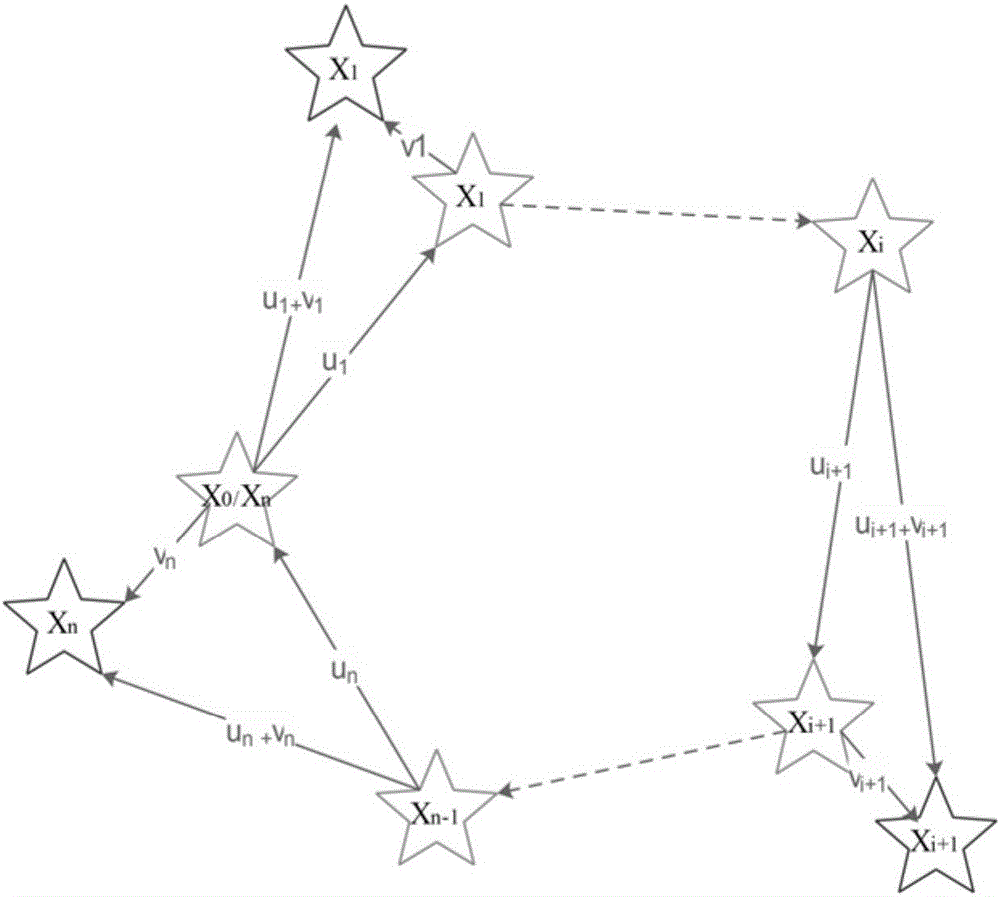
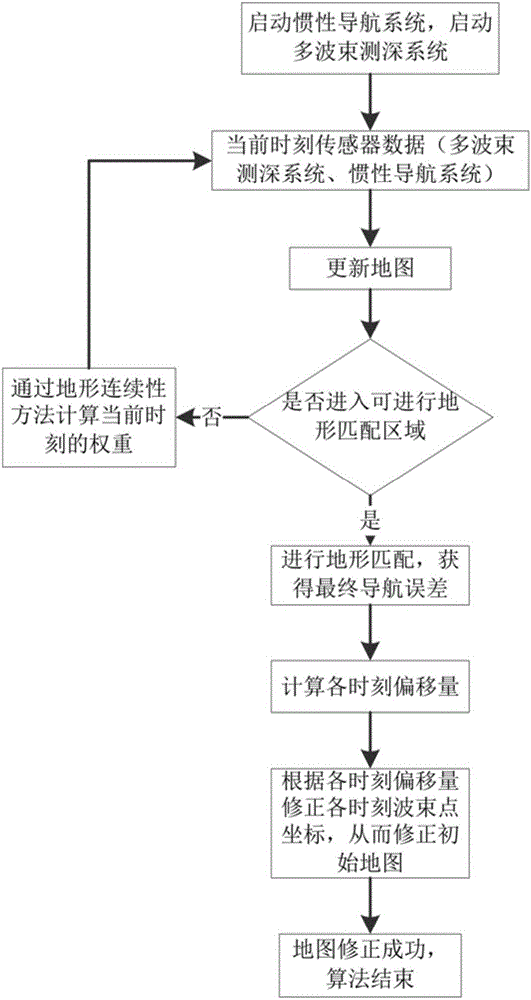
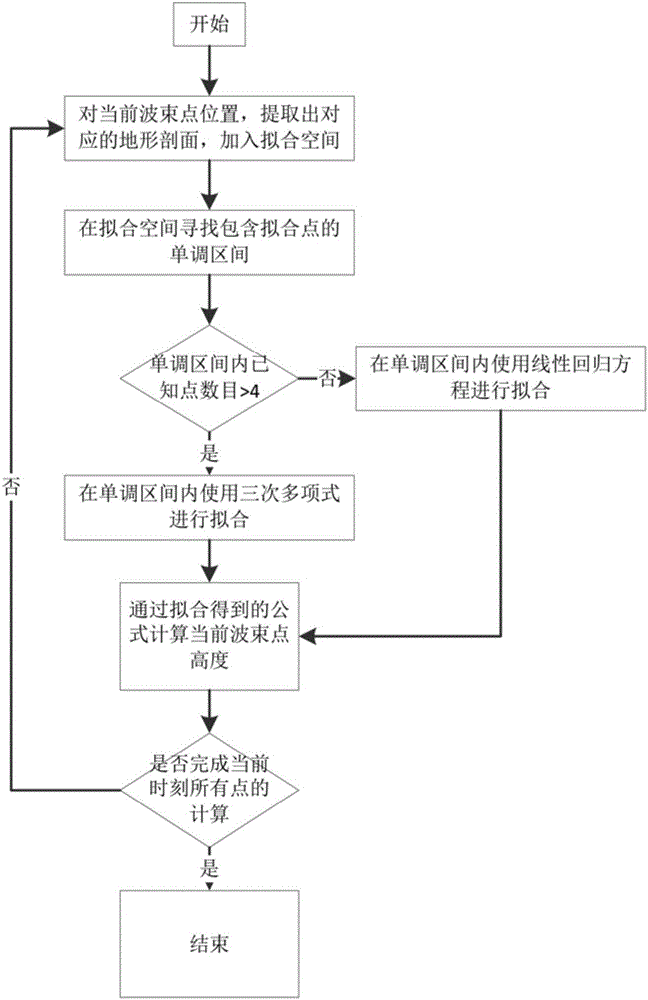
[0037] The purpose of the present invention is to provide a seabed topography correction method capable of carrying multi-beam sonar on an AUV, including front-end map construction and back-end map correction, first start the multi-beam bathymetry system to collect terrain data, and start the inertial navigation system to collect estimated positions data. The accurate relative position between the head and the tail is determined by the terrain matching method, and the estimated relative position of the head and the tail is given by the inertial navigation, so as to obtain the final navigation error of the tail inertial navigation system. The inertial navigation system is simplified as a spring model, and the relationship between each node error and the actual final navigation error is calculated through the stiffness coefficient formu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More