

Multifunctional operation type underwater robot
An underwater robot, multi-functional technology, applied in the direction of underwater operation equipment, ships, ship salvage, etc., to achieve the effect of large range, strong cross-country ability, and convenient salvage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
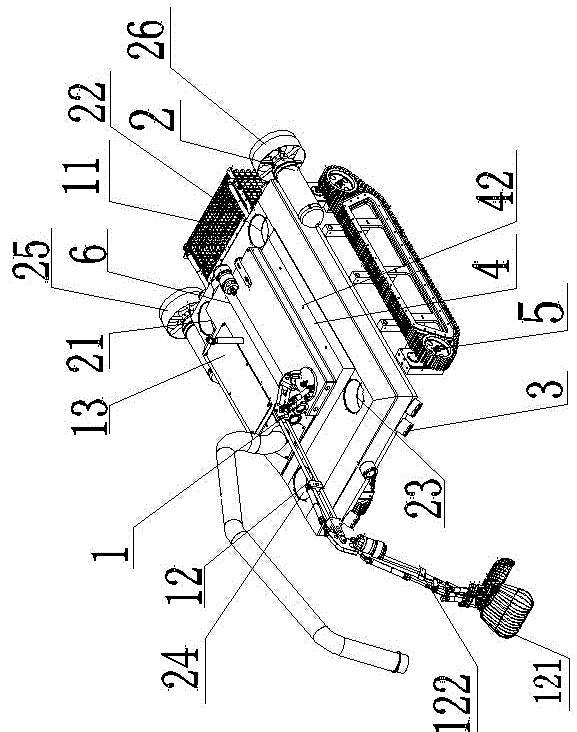
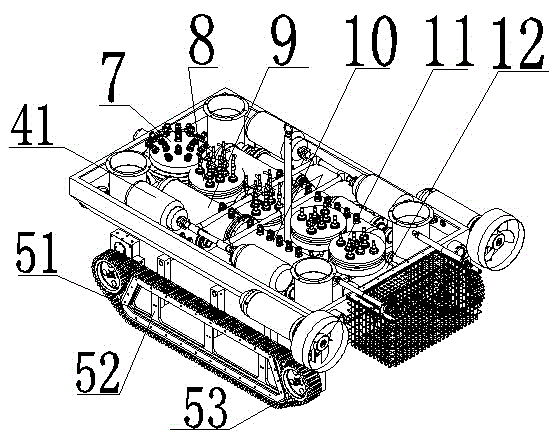
[0022] As shown in the figure, a multifunctional underwater robot includes a pick-up device 1, a drive device 2, a camera and lighting device 3, a sink-float device 4, a walking device 5, and a housing 6. The pick-up device 1 is placed in the housing The top of the body 6, the four corners and the tail of the housing 6 are equipped with a drive device 2; the sinking device 4 is distributed on the four corners and both sides of the housing 6; the camera and lighting device 3 is fixed on the pickup device 1 and the housing 6; The running device 5 is placed at the lower part of the casing 1 .
[0023] Further, the picking device 1 includes a manipulator 12 used in conjunction with the collection basket 11 and a suction filter box 13 arranged on the upper part of the housing 6 , the manipulator 12 includes a mechanical gripper 121 and a mechanical gripper 121 connected to it. Arm 122, the mechanical arm 122 is a hydraulic structure, the hydraulic cylinder is pneumatic or hydraulic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More