

Control method for unpowered descending speed
A speed control and power technology, which is applied in the field of unpowered downhill speed control of inspection robots, can solve problems such as the working state of the drive system, and achieve the effects of accurate speed control, convenient practicality, and simple speed control method.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The speed control method will be introduced in more detail below in conjunction with the schematic diagram.
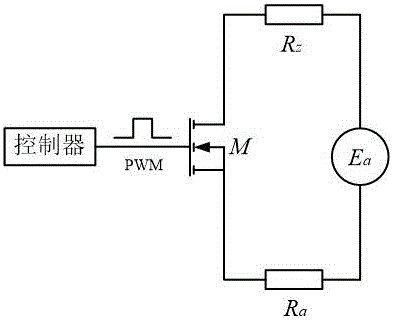
[0022] as attached figure 1 shown. According to the pulse width modulation method, by changing the duty ratio of the PWM wave of the control circuit, the on-off control of the switching device (such as MOS transistor) of the inverter circuit can be realized, thereby realizing the output voltage of the inverter circuit ( That is, the control of the armature induced electromotive force in the circuit.
[0023] attached to figure 1 Using Ohm's law for the loop in
[0024] u a =I a (R a +R z ) (1)
[0025] Among them, u is the duty cycle of PWM wave, E a is the induced electromotive force of the armature, I a is the armature current, R a is the armature resistance, R z is the energy consumption resistance;
[0026] Calculated from the electromagnetic torque formula
[0027] T=K t I a (2)
[0028] Among them, T is the electromagnetic torque, K t is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More