

A 3D point cloud segmentation method based on multi-line lidar
A multi-line laser and 3D technology, applied in 3D modeling, 3D image processing, instruments, etc., can solve problems such as false detection of obstacle points, low complexity, and impact on real-time performance, so as to improve the speed of clustering, Satisfies real-time performance and good filtering effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0063] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
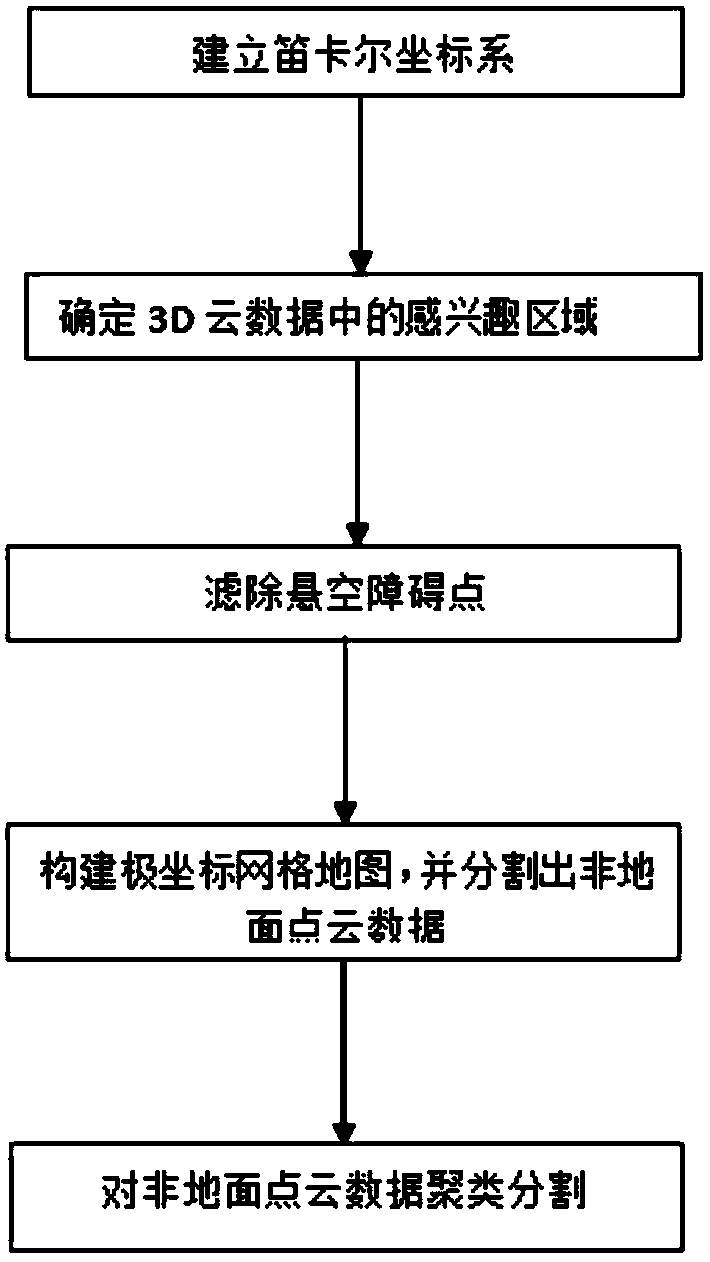
[0064] This embodiment describes a method for segmenting a multi-line laser radar 3D point cloud based on a vehicle-mounted mobile platform, which includes the following steps:
[0065] Step 1, such as figure 1 As shown, use the multi-line lidar installed on the top of the vehicle to scan the 3D point cloud data within 360°, establish the Cartesian coordinate system OXYZ, convert the 3D point cloud data to the Cartesian coordinate system, and then convert the 3D point cloud data to the Cartesian coordinate system. Preprocess the 3D point cloud data to determine the region of interest in the 3D point cloud data;
[0066] Wherein, the specific process of constructing the Cartesian coordinate system OXYZ includes:
[0067] When the multi-line laser radar is in a static state on the horizontal plane, the laser radar is the center point, the vertical axi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More