

Binocular visual indoor positioning method based on logo
An indoor positioning and binocular vision technology, applied in image data processing, instruments, computing and other directions, can solve the problem that it is not easy to extract the three-dimensional information of the target with monocular
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0023] Specific embodiment one: the logo-based binocular vision indoor positioning method of this embodiment is specifically prepared according to the following steps:
[0024] Step 1, set up the visual map (Visual Map) database of logo image collection;
[0025] Step 2. Calibration of the internal and external parameters of the binocular camera; use Zhang Zhengyou’s checkerboard calibration method to obtain the internal parameters of the left camera and the internal parameters of the right camera; use Matlab to determine the external parameters R and T of the relative pose relationship between the left camera and the right camera ;
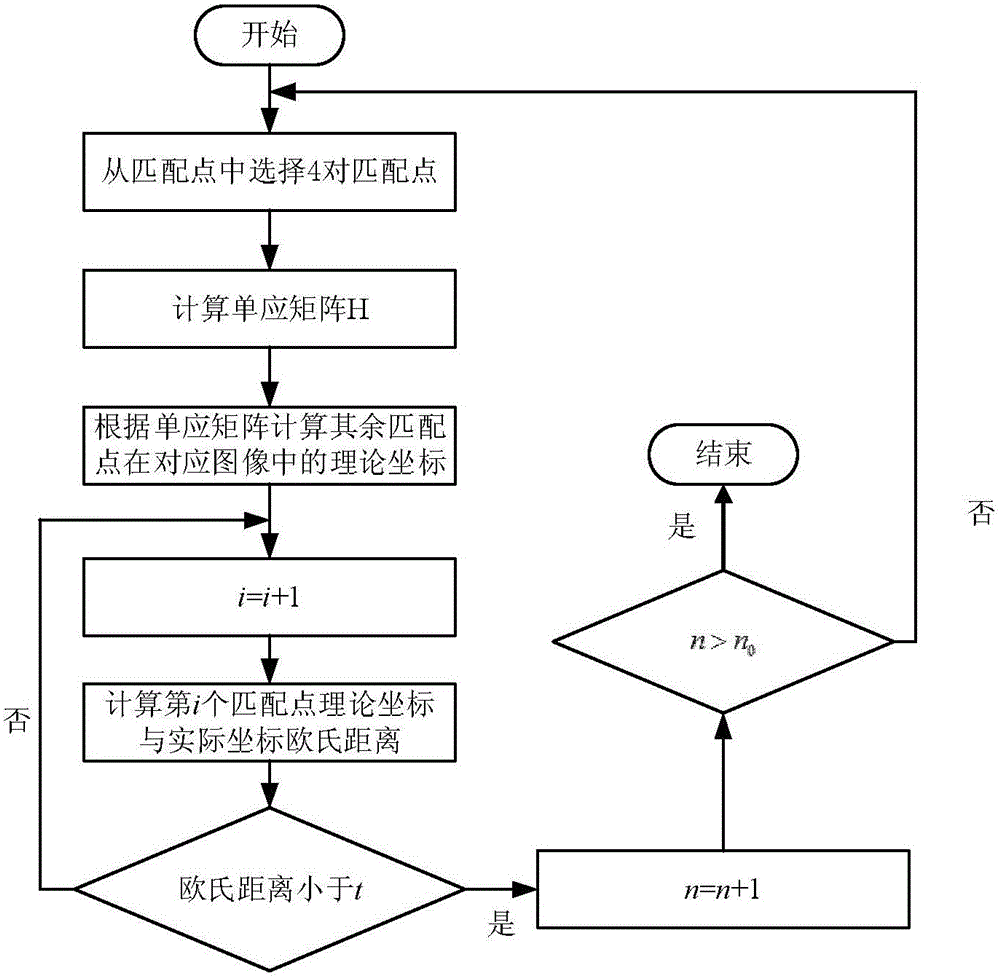
[0026] Step 3, use the binocular camera to shoot the logo image, use the visual information feature of the logo image to match the visual information feature of the VisualMap database image; keep the matching point and remove the wrong matching point;
[0027] Step 4. According to the pixel coordinates obtained in step 3 and Calculate the ve...
specific Embodiment approach 2
[0032] Specific embodiment two: the difference between this embodiment and specific embodiment one is: set up the visual map (Visual Map) database that logo image is collected in the step 1. The specific process is:
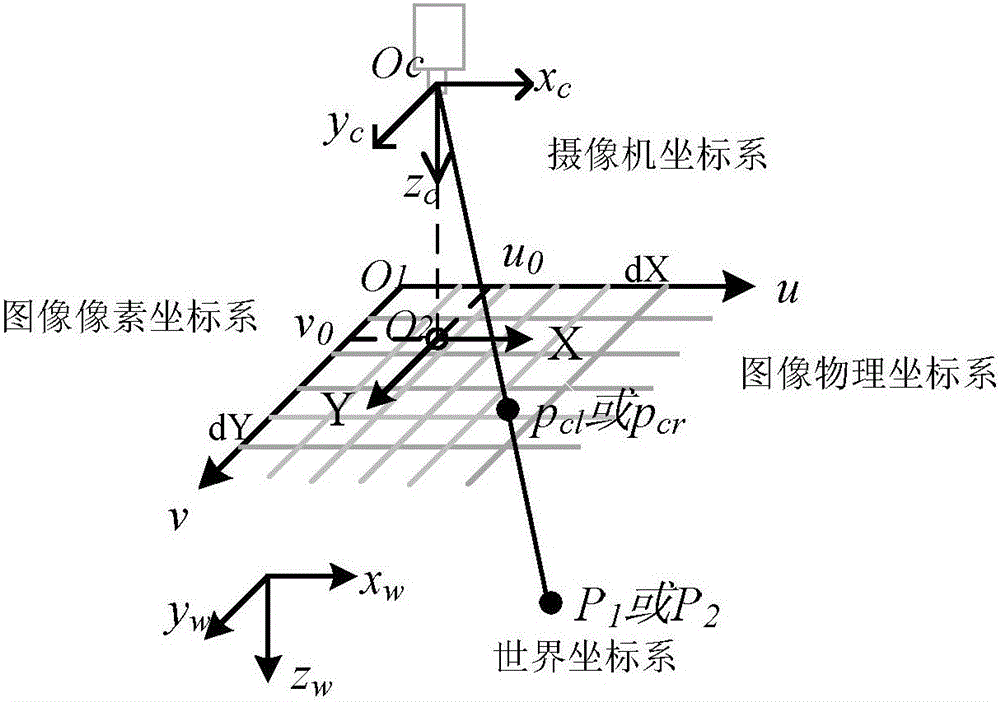
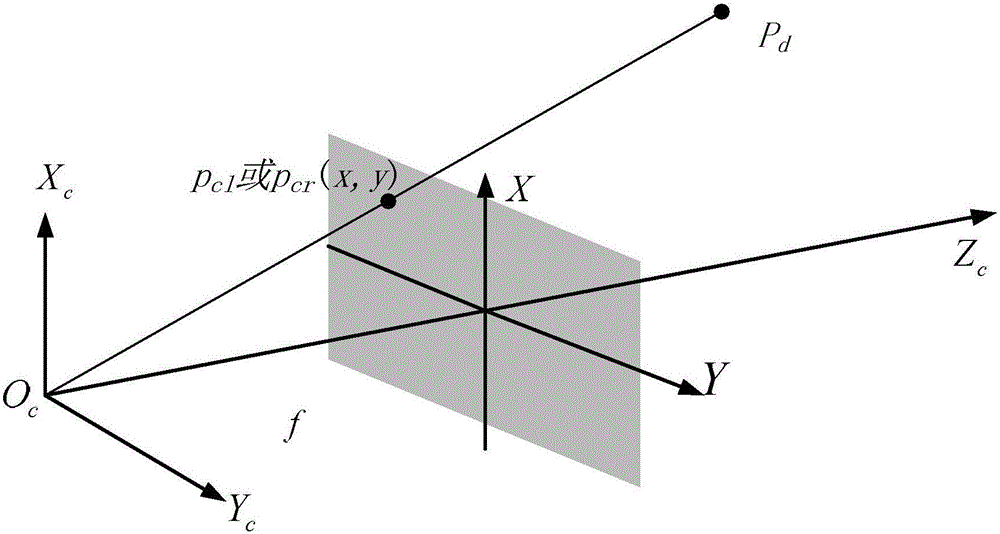
[0033] Step 11: Select the origin of the world coordinate system O(x w0 ,z w0 ), establish a plane two-dimensional Cartesian coordinate system O w x w Z w ;
[0034] Step 1 and 2: Use a monocular camera to collect the fixed logo image on the indoor wall, and record the vertex P of the captured logo image information 1 Position coordinates in the world coordinate system and vertex P 2 Position coordinates in the world coordinate system Save the vertex P of the logo image captured by the monocular camera 1 The pixel coordinates p 1 =(u 1 ,v 1 ), define the vertex P of the logo image captured by the monocular camera 2 The pixel coordinates p 2 =(u 2 ,v 2 ), the pixel coordinates (u 1 ,v 1 ), pixel coordinates (u 2 ,v 2 ),Position coordinates a...
specific Embodiment approach 3
[0036] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the calibration of the internal and external parameters of the binocular camera in step 2; using Zhang Zhengyou's checkerboard calibration method to obtain the internal parameters of the left camera and the internal parameters of the right camera; Using Matlab to determine the external parameters R and T of the relative pose relationship between the left camera and the right camera are as follows:
[0037] Step 21: Use Zhang Zhengyou’s checkerboard calibration method to calibrate the model parameter matrix of the left camera and the right camera in the Matlab software through the checkerboard plan, and read the internal parameter f of the left camera according to the model parameter matrix l and the intrinsic parameter f of the right camera r , put f l and f r to save;
[0038] Step two two, utilize Matlab to determine the external parameters R and T of the relati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More