

Bridge crane finite time trajectory tracking controller and design method thereof
A tracking controller, finite time technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as insufficient
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0085] The present invention will be further described below with reference to the drawings and embodiments.
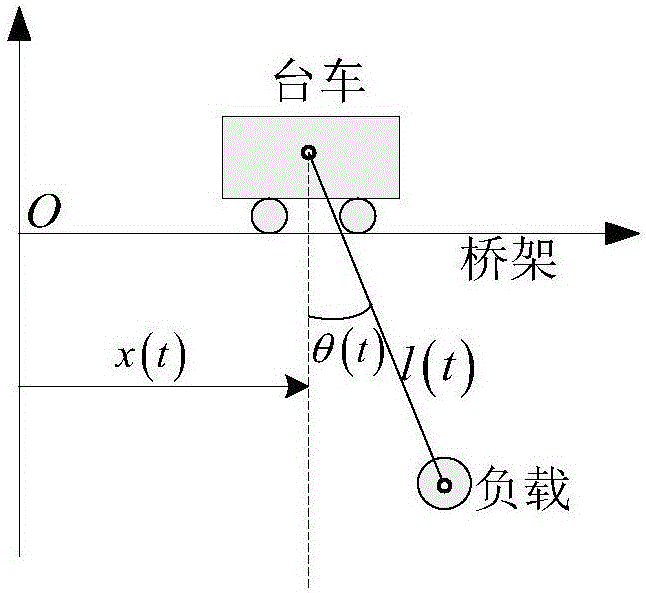
[0086] For different transportation tasks, the load quality and rope length are usually uncertain or different. Moreover, external disturbances are always accompanied by industrial overhead crane systems. In order to solve the above problems, a trajectory tracking control method with finite time convergence is proposed by reasonably defining the non-singular terminal sliding surface. The proposed control method is absolutely continuous and solves the limitations and shortcomings of traditional sliding mode control methods. The Lyapunov method is used to conduct a rigorous theoretical analysis of the stability at the equilibrium point of the closed-loop system and the finite convergence time T is calculated. The simulation results show that the proposed control method has strong robustness against model uncertainties, system parameter changes and external disturbances. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More