Cubature Kalman filtering (CKF) method applied to high-dimensional GNSS/INS deep coupling
A Kalman filter, deep coupling technology, applied in the field of filtering, can solve the problem of difficult nonlinear filtering methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
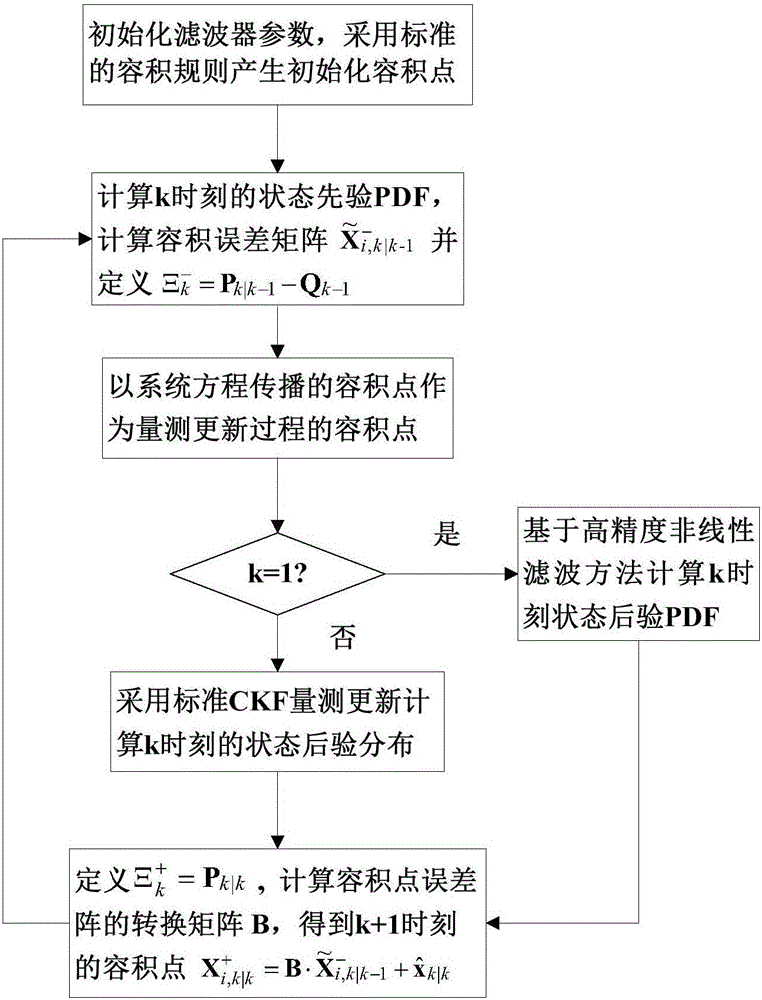
[0068] Such as figure 1 As shown, the volumetric Kalman filtering method suitable for high-dimensional GNSS / INS deep coupling of the present embodiment includes the following steps:
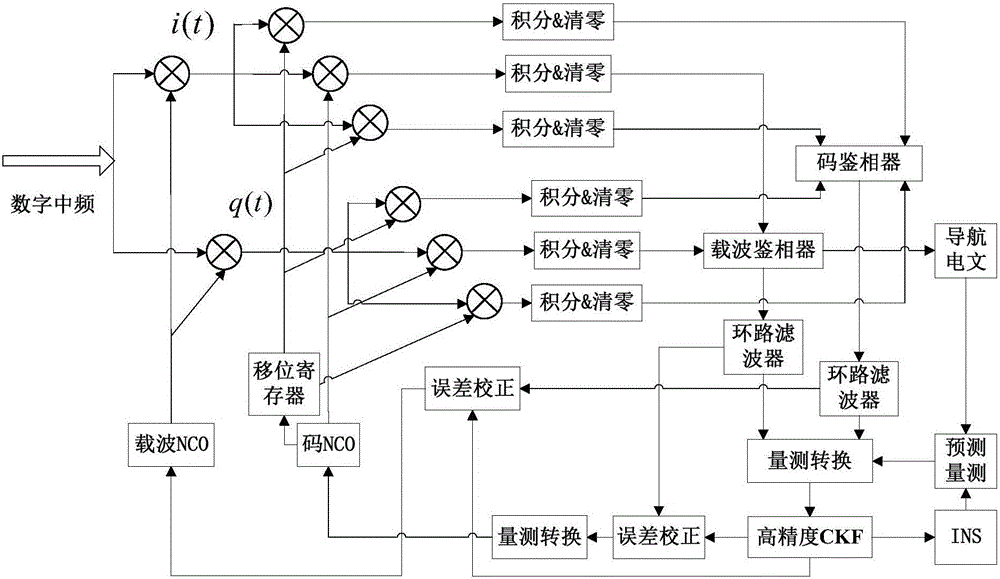
[0069] S1. Construct a high-dimensional GNSS / INS deep coupling filtering model, such as figure 2 shown.
[0070] Step S1 specifically includes:
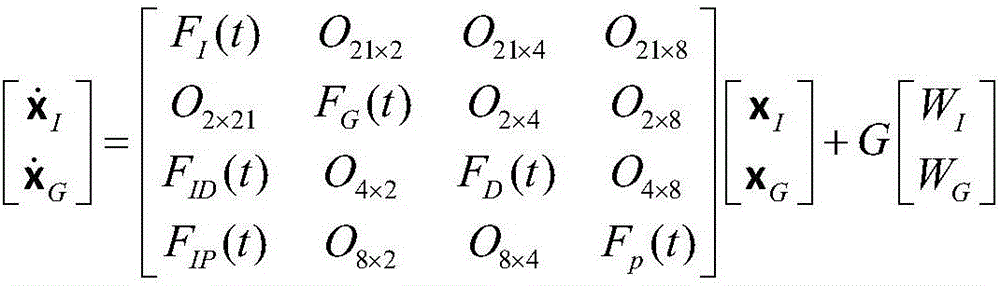
[0071] S11, respectively setting the INS state quantity of the INS and GNSS subsystems to be x I , GNSS state quantity is x G ,in,
[0072] x I =[δP δV ψ k a b a k ω b ω ]
[0073] x G =[b c d c δρ dll δφ pll δf pll ]
[0074] where [δP δV ψ k a b a k ω b ω ] are 3D position error, velocity error, attitude error, accelerometer coefficient error, accelerometer coefficient zero bias, gyroscope coefficient error and constant value drift respectively; [b c d c δρ dll δφ pll δf pll ] are the receiver clock offset, clock drift, phase detection pseudorange error of the code tracking loop, phase error of the carrier trac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More