

Total-space smooth hole insertion control method applied to assembly robot and based on real-time force control
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of judging and difficult to adapt to the needs of full-space operation of robots, so as to improve the success rate and efficiency, and avoid jamming and tightness. Phenomenon, Effect of Overcoming Hole-Shaft Alignment Error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0033] A full-space compliant socket control method for an assembly robot based on real-time force control, comprising the following steps:
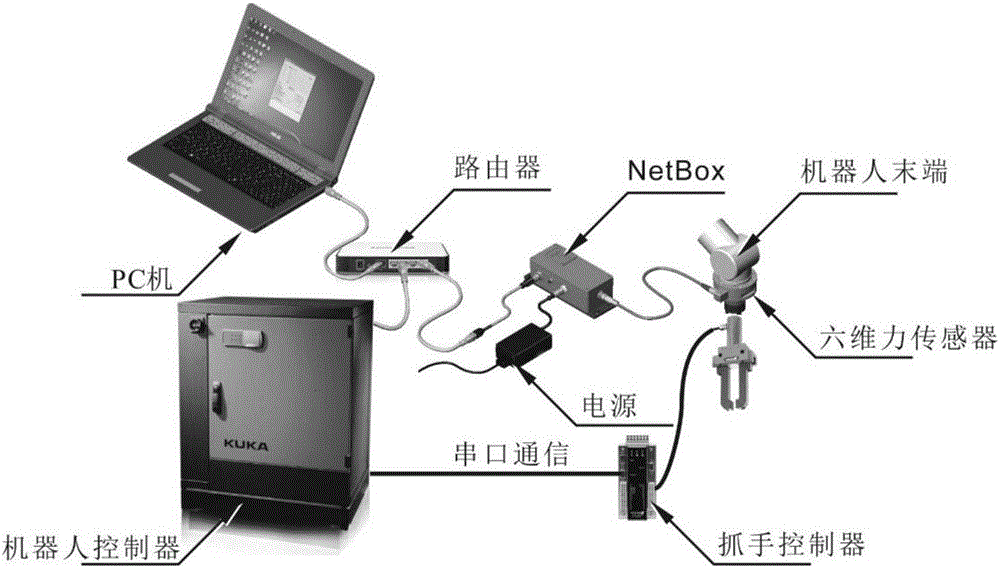
[0034] Step 1. Use the six-dimensional wrist force sensor, real-time communication software package, etc. to build a real-time communication force control platform for the assembly robot.
[0035] The specific steps are as follows: The system is mainly composed of KUKA robot body, robot controller and end effector, force sensor, upper computer and other main parts. The overall structure of the system is as figure 1 shown. The force sensor is installed at the end of the robot through an adapter to collect real-time force signals, and through the analysis of NetBox, the six-dimensional force data required for force control is obtained and sent to the host computer through Ethernet. The KUKA RSI real-time...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More