

Tandem double-duct type flight robot and dynamics cooperative control method thereof
A flying robot, ducted technology, applied in the field of unmanned aerial vehicles, can solve the problems of impracticality, small and light objects, and underutilized
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
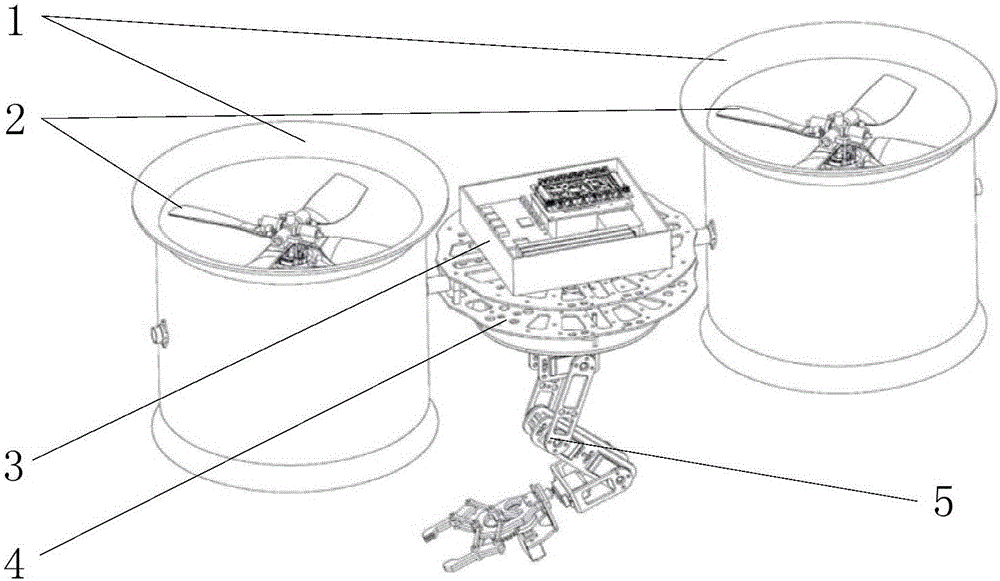
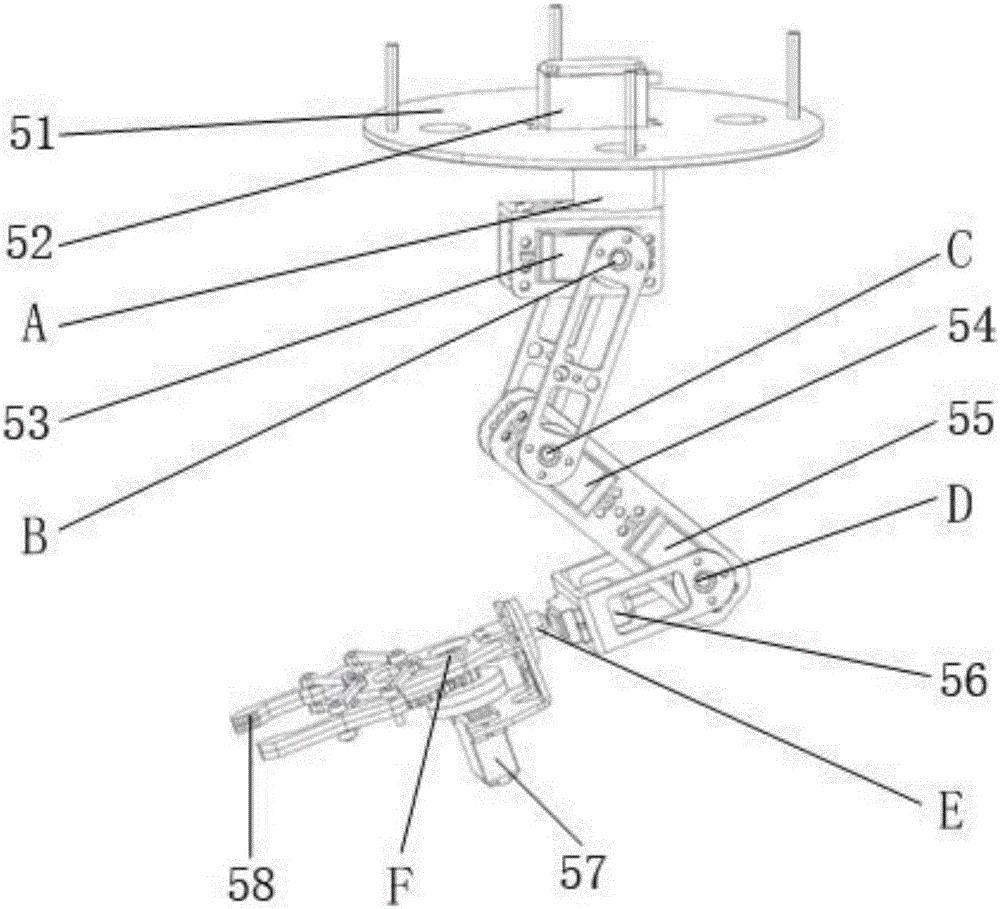
[0046] like Figure 1-4 As shown, the present invention provides a tandem double-duct flying robot, comprising a fuselage 4 and two ducts 1 symmetrically arranged at both ends of the fuselage 4, and a rotor system 2 is installed in the duct 1. , the main control system 3 is installed on the upper part of the fuselage 4, and the mechanical arm 5 is installed on the bottom of the fuselage 4.
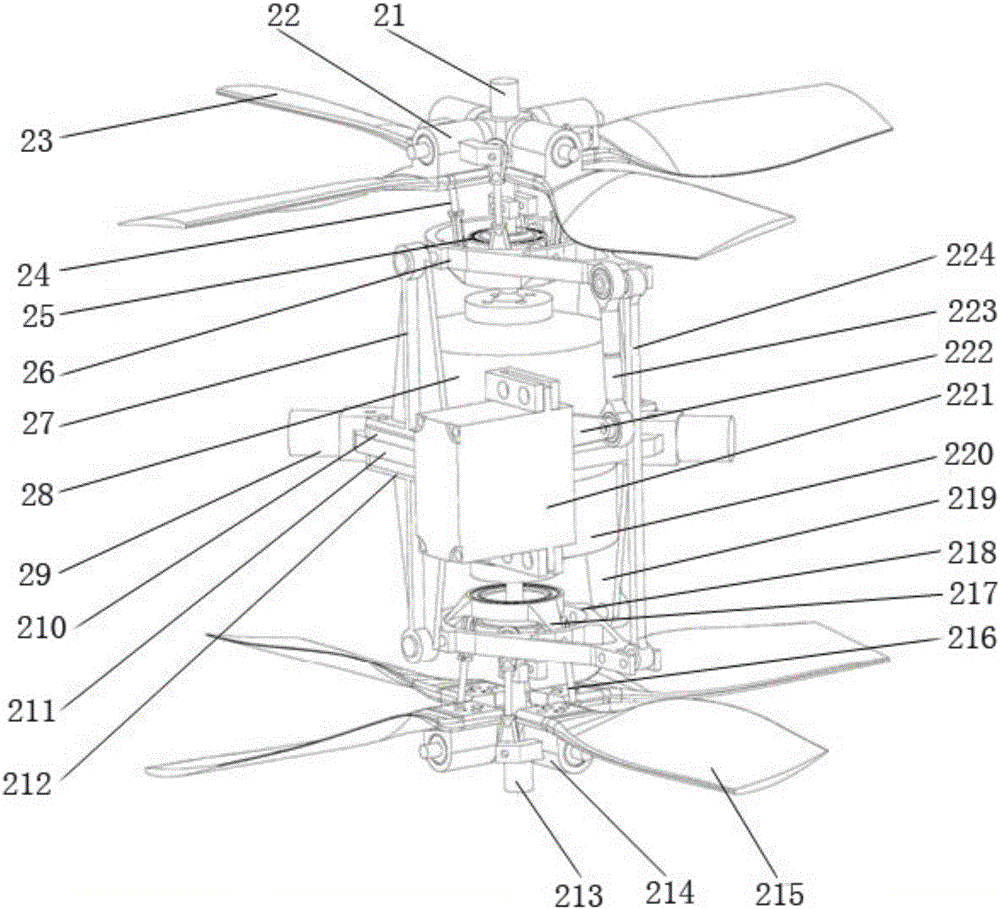
[0047] The rotor system 2 includes an upper rotor mechanism and a lower rotor mechanism fixed on the upper and lower sides of the base plate 211 in the middle of the duct 1. The 211 base plate is installed on the fuselage 4 through the main beam joint, and the upper rotor mechanism includes an upper rotor hub. 21. Upper paddle clamp 22, upper blade 23, upper pitch-variable pu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More