

Semi-active heave compensation system for cabled underwater robot
An underwater robot and heave compensation technology, which is applied to mechanical equipment, clockwork mechanism, fluid pressure actuation device, etc., can solve the problems of huge equipment, limited compensation ability, complex system, etc., and achieve low energy consumption and satisfactory The effect of compensation accuracy and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the objectives, technical solutions and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not conflict with each other.
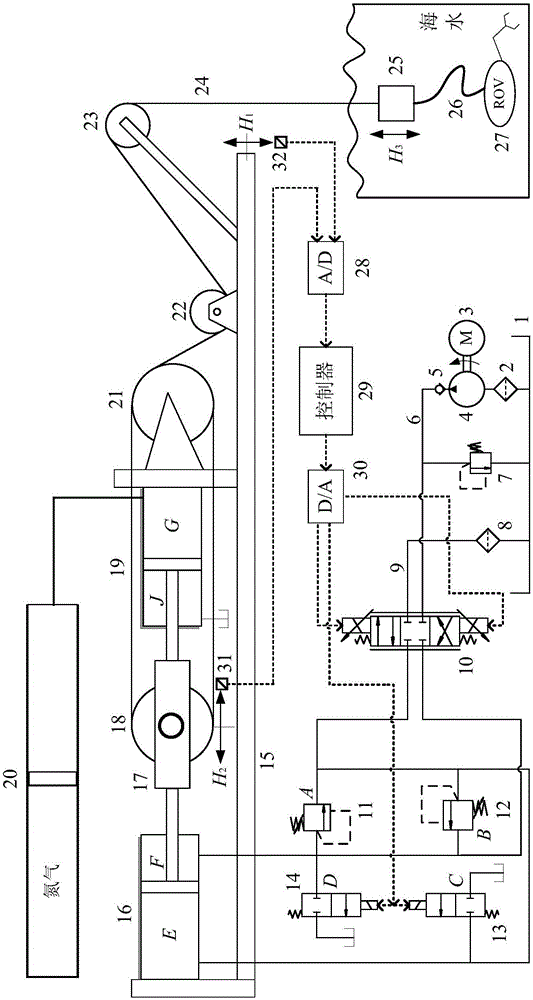
[0020] Such as figure 1 As shown, a semi-active heave compensation system for a cabled underwater robot of the present invention includes a passive heave compensation unit, an active heave compensation unit and an underwater armor cable unit. Among them, the passive heave compensation unit includes a passive cylinder 19 and a gas-liquid accumulator 20, which are used to compensate the static load of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More