

Filter initialization method under condition of unequal measurement time intervals
An initialization method and time interval technology, applied in the field of radar target tracking and filtering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The filter initialization method proposed by the present invention in the case of unequal measurement time intervals will be described in detail below with reference to the accompanying drawings.
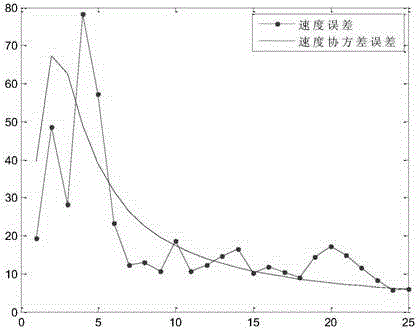
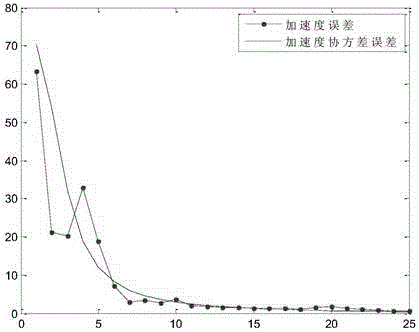
[0033] Assume that the single target moves in a straight line with uniform acceleration on the (x, y, z) plane, the initial position is (0m, 5000m, 0m), the speed in the x direction is 100m / s, the speed in the y direction is 100m / s, and the speed in the z direction is 0m / s. Acceleration in x direction 5s / m 2 , the acceleration in the y direction is 2s / m 2 , the speed in the z direction is 0s / m 2 . The radar does not move, the position coordinates are (0m, 0m, 0m), and the root mean square of the measurement errors in distance, azimuth, and elevation are 50m, 0.2°, and 0.2°, respectively. The three-point measurements obtained by the 3 / 4 logic method track start are shown in Table 1.
[0034] The specific steps of the present invention are as attached figure 1 shown.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More