Automatic tree extraction method from laser scanning point cloud based on local interval maximum
A laser scanning and automatic extraction technology, applied in computer parts, instruments, calculations, etc., can solve problems such as missing trees, missing trunks, unable to fit circles, etc., to avoid calculation instability, avoid repeated extraction, overcome uneven distribution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
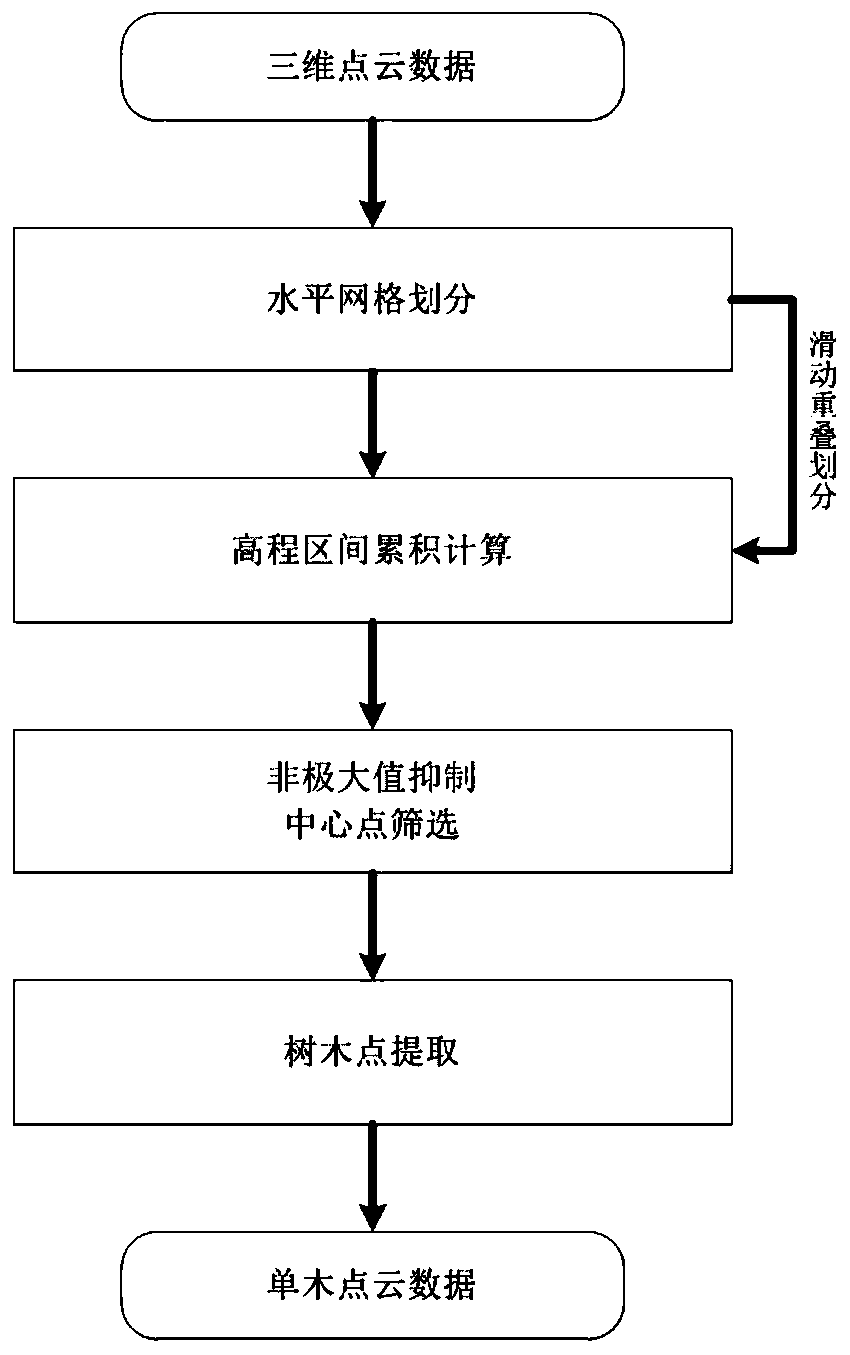
[0045] Such as figure 1 As shown, the method of automatic extraction of trees from laser scanning point cloud based on local interval maximum includes the following steps:
[0046] (1) Perform grid division on the obtained 3D point cloud data, and establish a non-empty grid index, specifically:
[0047] a, input the whole three-dimensional point cloud data set P, calculate the maximum and minimum values of the point set P in the direction of three orthogonal coordinate axes, then set the square grid, and the side length of each grid is set to 1 (in this embodiment l=0.2m), divide the original point cloud into grids on the XOY plane according to the calculated maximum and minimum values, and divide each point p i =[x i ,y i ,z i ](p i ∈P, i=1,2,...,s, s is the number of points) according to [p x ,p y ] value, divide the point into the corresponding grid, and establish the corresponding index relationship;
[0048] b. In the process of traversing each point, record the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More