

Haptic representation sense of reality objective evaluation method based on human haptic perception feature
An objective evaluation method and tactile reproduction technology, applied in the fields of instruments, character and pattern recognition, computer parts, etc., can solve problems such as poor consistency of general evaluation results, eliminate the influence of environmental and human subjective factors, save time, Efficient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings.
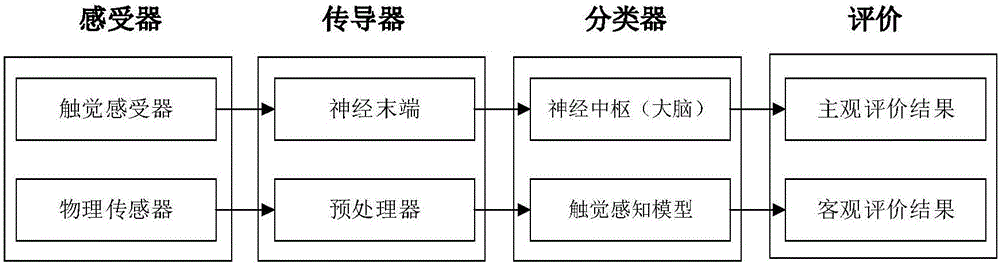
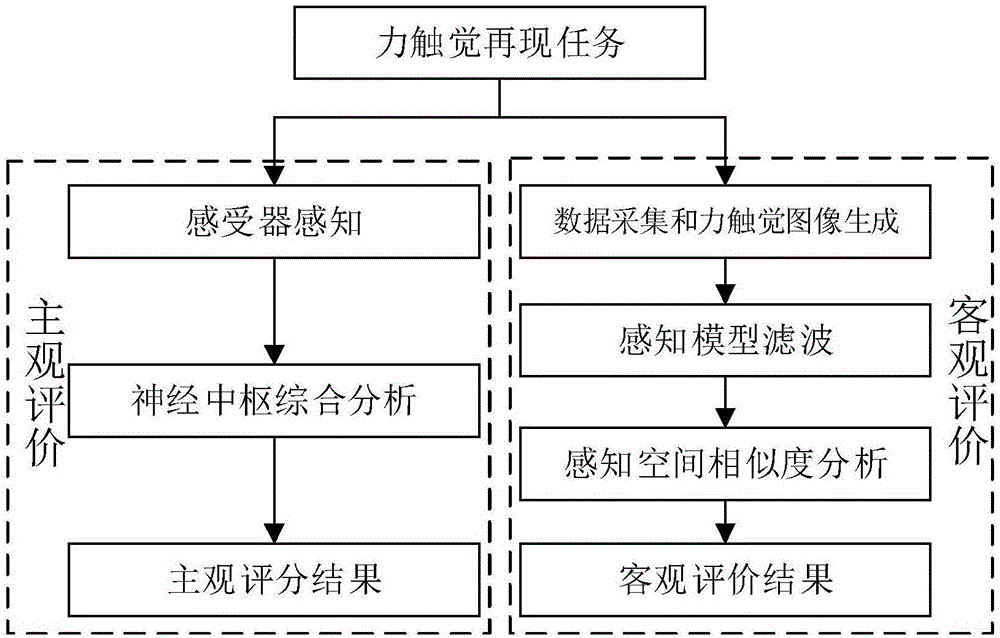
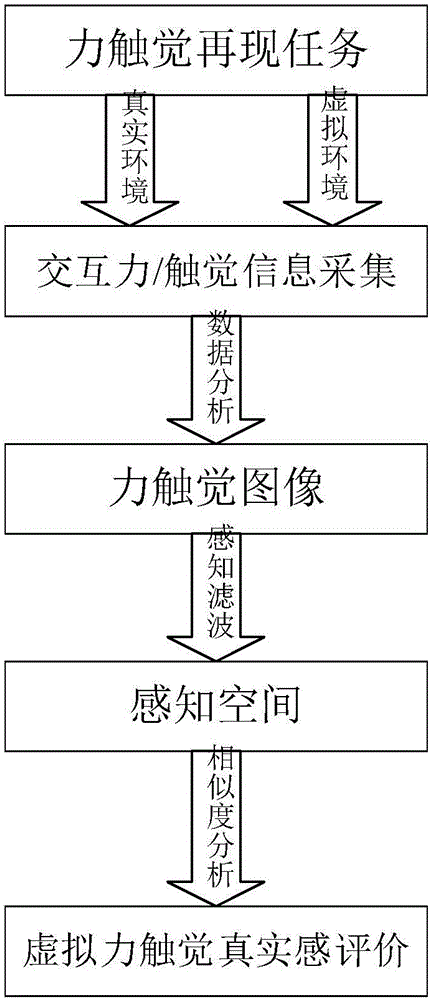
[0028] An objective evaluation method for the realistic sense of force-tactile reproduction based on the characteristics of human tactile perception proposed by the present invention is a simulation of the task process of human subjective perception and evaluation of force-tactile reproduction, as shown in the attached figure 1 As shown, both subjective and objective force tactile reproduction realistic evaluations include four basic steps of perception, conduction, classification, and evaluation, in which tactile receptors and physical sensors belong to the perception process, nerve conduction and data preprocessing belong to the conduction process, and the nerve center (brain ) and tactile perception model processing belong to the classification process, and the final result belongs to the evaluation process. Specific to the objective evaluation m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More