

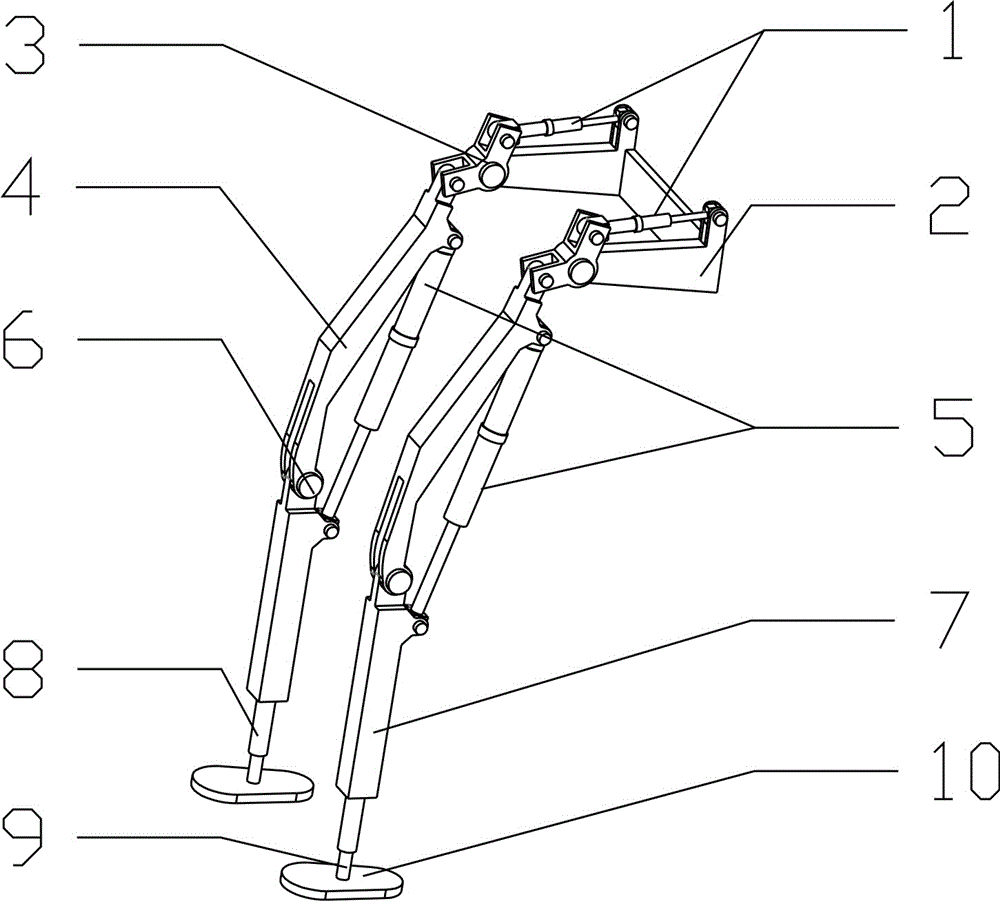
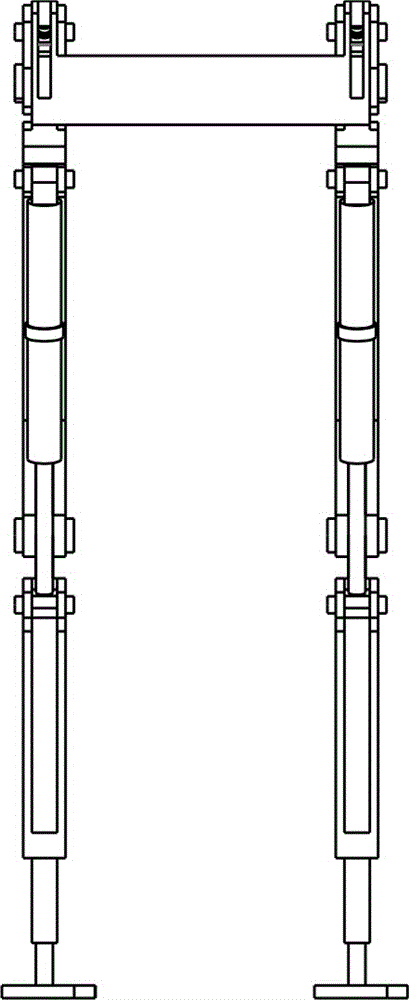
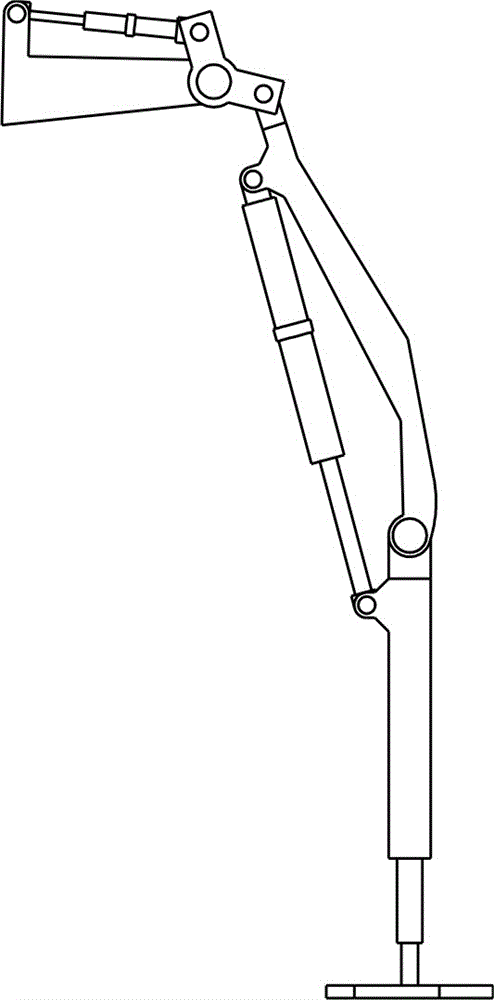
Assisting exoskeleton mechanism system for lower limbs
An exoskeleton and lower limb technology, applied in the field of robotics, can solve the problems of low stiffness and poor stability, and achieve the effects of high stiffness, strong stability and reduced system weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] In the passive power assist mode, the system reads the data transmitted by the sensor, and predicts the walking trend of the walker based on the data, and the lower limb assist exoskeleton system runs along this walking trend, playing the role of walking assist. This motion mode is often used in portable load-carrying robot systems.
[0035] The working process of this embodiment:
[0036] The system first uses the data sent back by the ankle joint angular displacement sensor, the knee joint angular displacement sensor and the hip joint angular displacement sensor, and through kinematic analysis, it calculates the current position of the lower limb power-assisted exoskeleton mechanism, and predicts the system's motion position at the next moment. By driving each drive joint motor and air-hydraulic cylinder to achieve the predicted pose, and then reading the sensor position again to predict the system motion pose at the next moment, the open-loop control of the system is r...
Embodiment 2
[0039] In the active assist mode, the lower limb assist exoskeleton mechanism system is pre-programmed into its walking route, and the planned walking is completed through the measurement of each sensor and the closed-loop control system, and the walker moves passively with it. This motion model is often used in medical rehabilitation systems.
[0040] The working process of this embodiment:
[0041] Through the calculation and analysis of dynamics and kinematics, the motion mode of the system is first programmed into the system program, and the control of the predetermined motion mode of the system is completed in a closed loop through the motor, air-hydraulic cylinder actuator and various sensors. The walker moves passively with it.
[0042] In this example, the lower limb assisting exoskeleton mechanism system acts as the active party to plan the movement and plays an assisting role, and the walker moves passively with it, so this movement mode is called the active assisti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More