Inner wall corner climbing robot
A technology of robots and corners, applied in the field of wall-climbing robots, can solve the problems of complex adsorption of wall-climbing robots, and achieve the effects of easy implementation, simple control and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
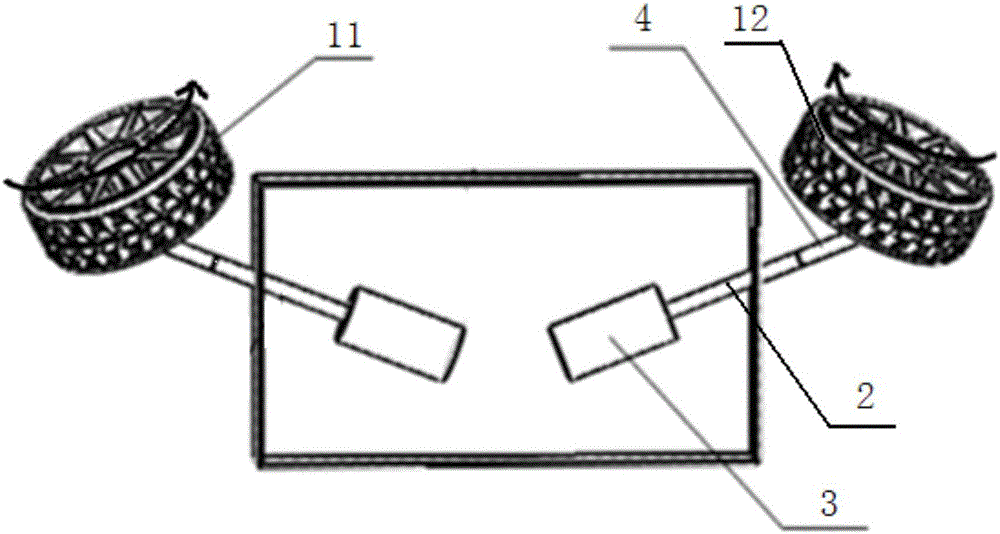
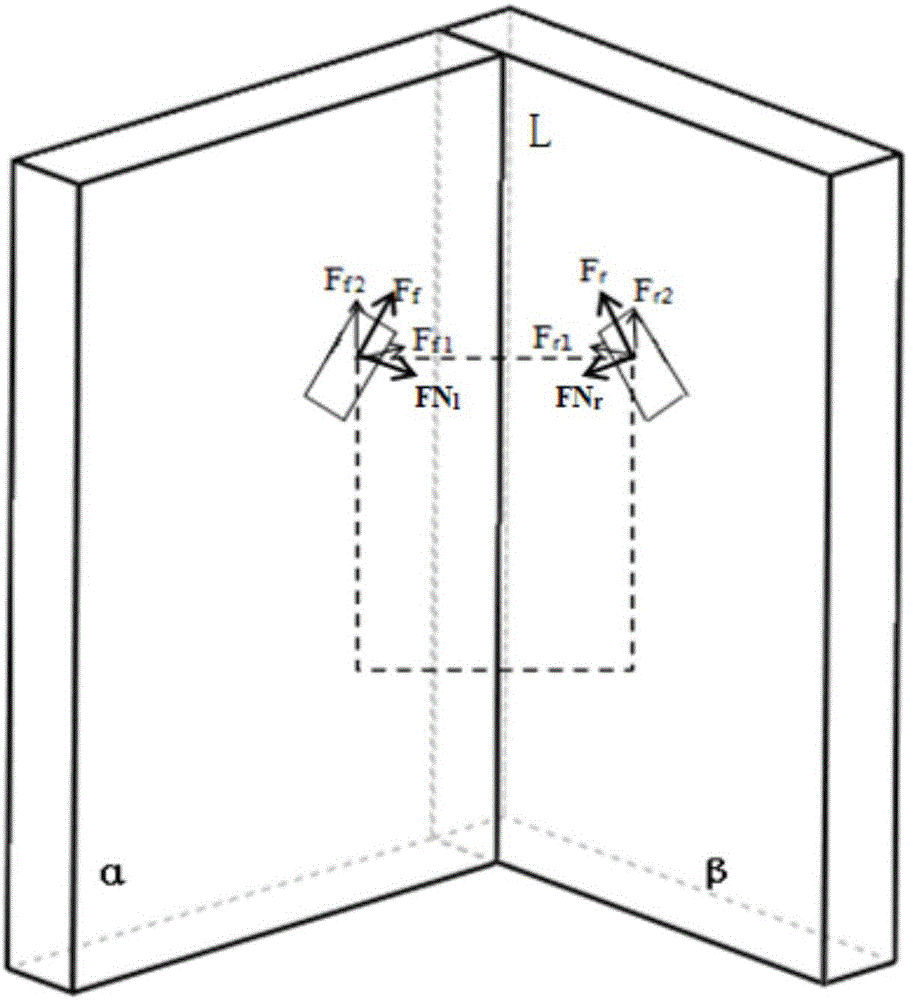
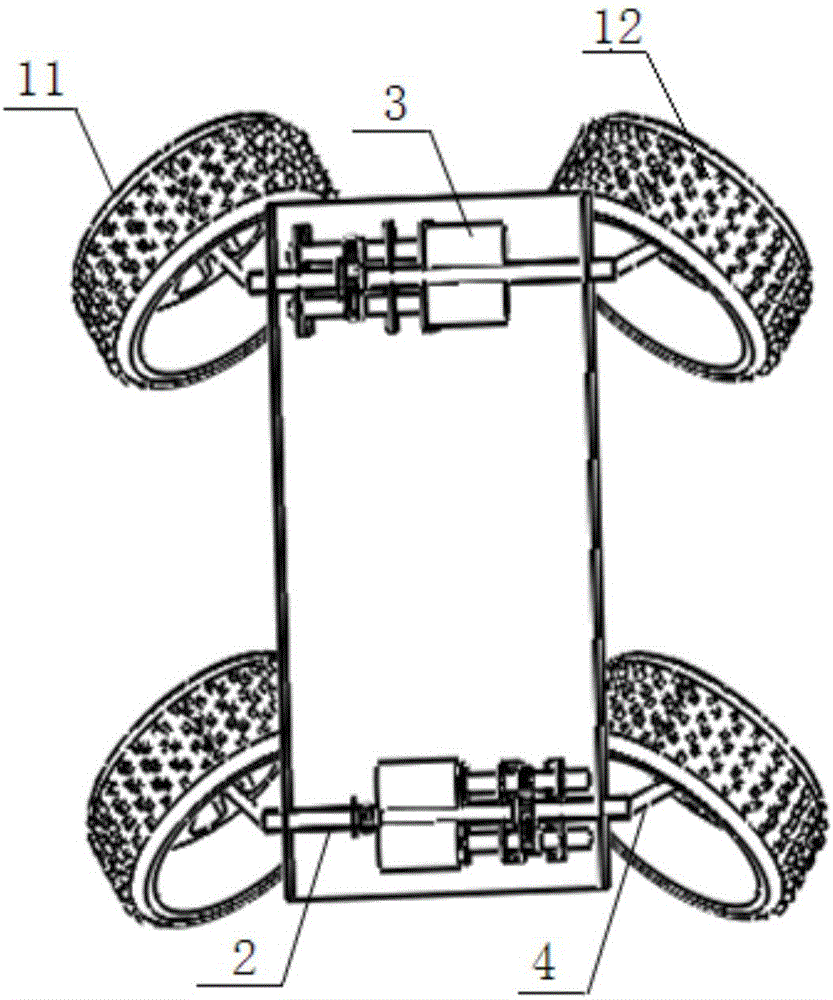
[0021] Aiming at the phenomenon that buildings have inner wall corners, the present invention proposes a wall-climbing robot relying on wall corners. Instead of using high-power negative pressure adsorption technology, it relies on the friction between the drive device 3 of the main body and the wall to achieve the purpose of adsorbing the wall. like figure 1 As shown, in addition to the fuselage and the driving device 3, the climbing robot of this program also includes action wheels symmetrically arranged on both sides of the fuselage. The output of the driving device 3 is connected to a transmission device 2, and the transmission device 2 A universal component 4 is connected with the action wheel. The driving device 3 generates power, and the transmission device 2 transmits the power to the action wheels. The universal component 4 is a part for real...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com