

Unmanned aerial vehicle tunnel inspection system based on BIM technology
A patrol inspection system and unmanned aerial vehicle technology, applied in the direction of navigation through speed/acceleration measurement, can solve the problem of low navigation accuracy, achieve the effect of fast data collection, rich information, and reduced inspection time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
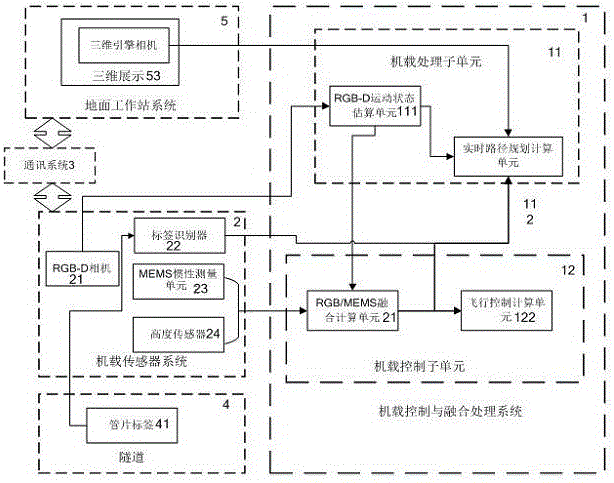
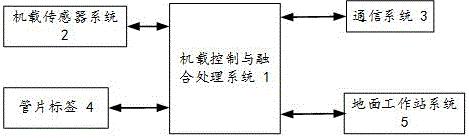
[0056] See Figure 1 ~ Figure 5 , The UAV tunnel inspection system based on BIM technology is characterized in that the airborne control and fusion processing system is connected to the segment label, airborne sensor, communication system and ground workstation system;
[0057] 1) The segment label is used to locate the position of the segment in the tunnel;
[0058] 2) Ground workstation system, used to control and navigate the UAV's inspection route in the tunnel; among them, the control and navigation of the inspection route further include:
[0059] The correspondence establishment subunit is used to obtain the correspondence between the drone and the 3D engine roaming camera in the 3D display of the tunnel model based on BIM technology;
[0060] The 3D model generation subunit of the inspection route is used to obtain the real 3D model of the UAV in the tunnel inspection route;
[0061] 3) The airborne sensor system is used to obtain images of tunnel diseases in the tunnel inspect...
Embodiment 2
[0071] See figure 1 , Reveals a UAV tunnel inspection system based on BIM technology, including: an airborne control and fusion processing system connected to the segment label, ground workstation system, airborne sensor system and communication system.
[0072] See Figure 4 The ground workstation system of this embodiment includes a correspondence establishment subunit and a three-dimensional model production subunit of the inspection route; the correspondence establishment subunit is used to establish a tunnel model through BIM technology and import it into the three-dimensional display software. The coordinate system conversion method obtains the relationship between the drone navigation coordinate system and the coordinate system of the 3D engine roaming camera, and establishes the corresponding relationship between the drone and the 3D engine roaming camera; firstly, obtain the drone leaving the tunnel through the RGB-D camera For the left, right and upper distances, adjust...
Embodiment 3
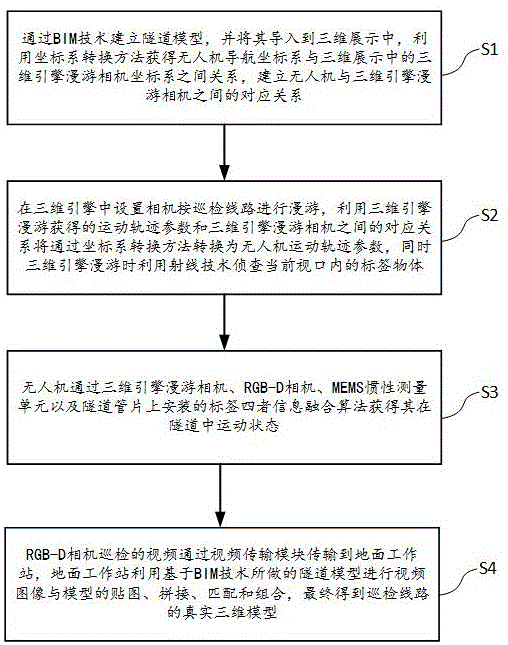
[0112] See image 3 , This BIM technology-based drone tunnel inspection method includes the following steps:
[0113] [Step 1] Establish the tunnel model through BIM technology and import it into the 3D display, use the coordinate system conversion method to obtain the relationship between the drone navigation coordinate system and the 3D engine roaming camera coordinate system, and establish the drone and 3D engine Correspondence between roaming cameras;
[0114] Among them, the coordinate system conversion method obtains the relationship between the drone navigation coordinate system and the three-dimensional engine roaming camera coordinate system. The relationship is obtained by first obtaining the distance between the drone and the tunnel from the left, right, and up through the RGB-D camera, adjusting the drone to the same position as the starting coordinates of the 3D engine roaming, so that the two coordinate systems coincide, and then using The quaternion performs the coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More