

Filtering method for IMU multi sensor data fusion
A data fusion, multi-sensor technology, applied in directions such as navigation through velocity/acceleration measurement, can solve the problems of difficulty in determining the switching frequency of high-pass filter and low-pass filter, small amount of calculation, and low amount of calculation, and achieves a high level of improvement. Effect of measurement accuracy and dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
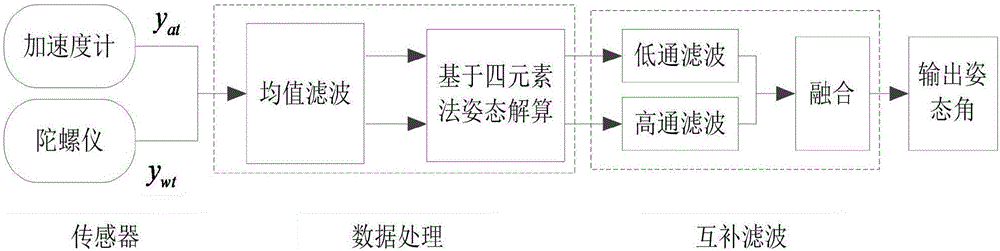
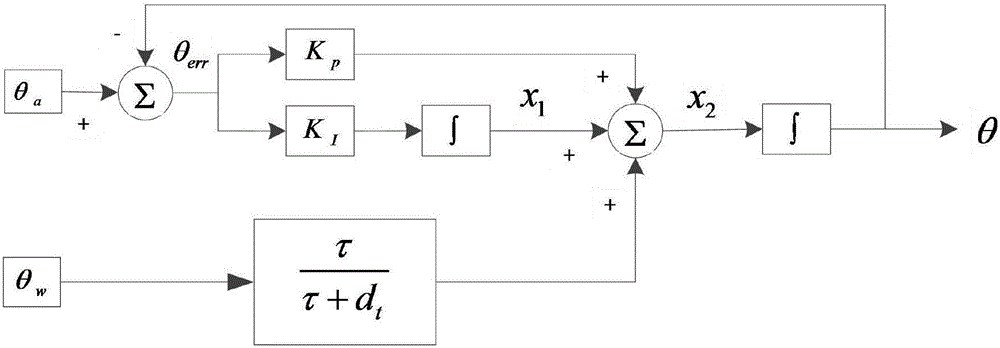
[0047] refer to figure 1 The invention proposes a filtering method for IMU multi-sensor data fusion. First, the data is collected, and the IMU inertial detection system composed of multiple sensors such as gyroscopes and accelerometers obtains the attitude data of the aircraft and establishes sensor output signals. The mathematical model expression of each sensor; secondly, the output data of each sensor is processed, mainly including the use of moving average filtering to remove interference information and noise, and then based on the four-element method to solve the rotation angle of each sensor; and then using high-pass filter and low-pass filter Combined with the filter, add PI control parameters in the low-pass filter part, and i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More