

LTL-A*-A*optimal path planning method applicable to dynamic environment
A technology of optimal path planning and dynamic environment, applied in the direction of adaptive control, general control system, instrument, etc., can solve the problems that cannot be satisfied, must reach other points, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with accompanying drawing.
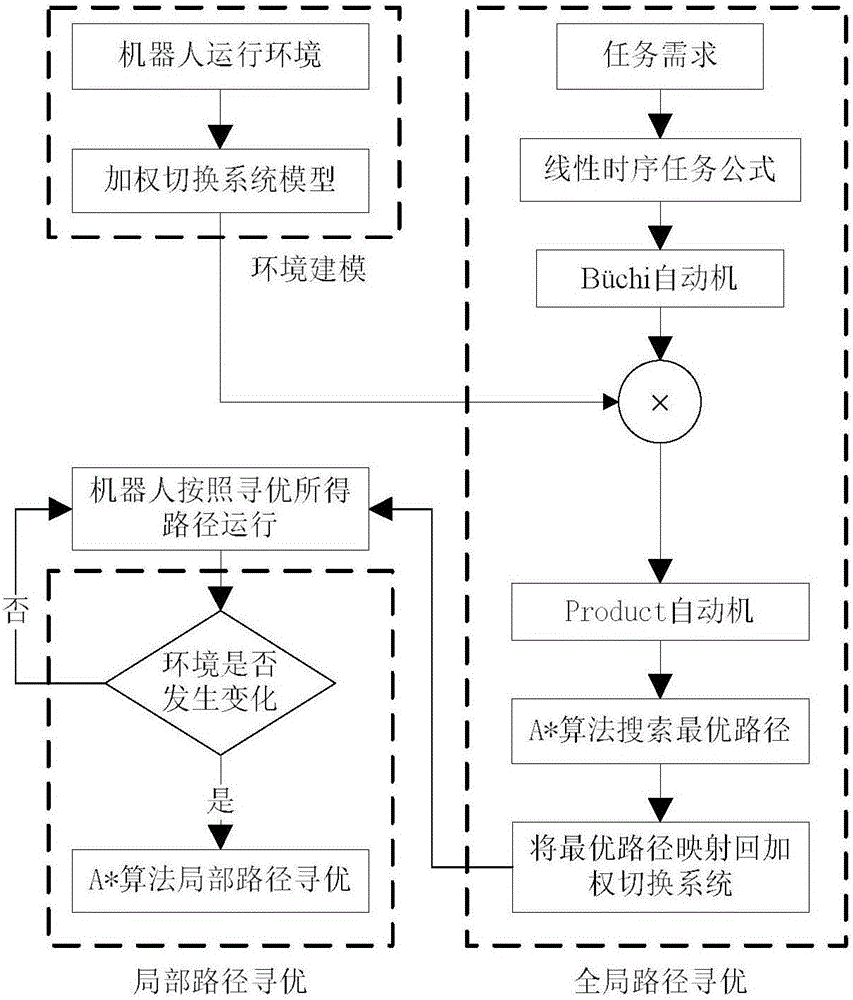
[0023] The LTL-A*-A* optimal path planning method suitable for dynamic environments mainly has the following contents: First, the robot operating environment is modeled as a weighted switching system model, and the task requirements are described by the linear temporal logic (LTL) task formula, and Convert it into a graph form (Büchi automata) through the LTL2BA toolkit; then, according to the linear sequential logic theory, the environmental information and task requirements are fused to construct a task-feasible network topology; then, the A* algorithm is used to search on the task-feasible network topology The optimal path; after that, the optimal path on the task-feasible network topology is mapped back to the weighted switching system to obtain the corresponding global optimal path in the environment; finally, when the local environment changes during the robot’s operat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More