

Self-calibration and compensation method for framework nonorthogonal angle of triaxial rotating inertial navigation syste
An inertial navigation system, three-axis rotation technology, applied in the direction of measuring devices, instruments, etc., can solve the research on non-orthogonal angle calibration of the rotating inertial navigation frame is rare, reduce the attitude output accuracy of the rotating inertial navigation system, and the attitude output of the rotating inertial navigation system Accuracy drop and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be further described below in conjunction with the accompanying drawings.
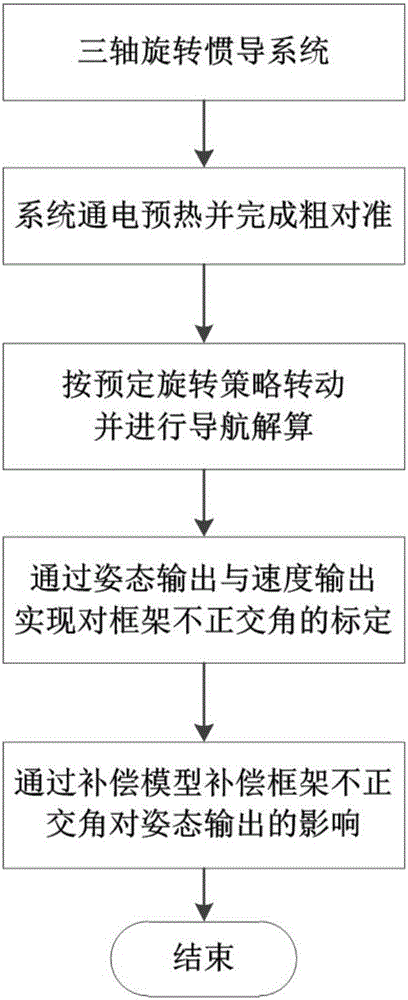
[0080] figure 1 The flow chart of the implementation of the non-orthogonal angle self-calibration and compensation method for the frame of the three-axis rotary inertial navigation system of the present invention is given. The main steps of the method are: the three-axis rotary inertial navigation system is powered on for preheating and rough alignment is completed; the three-axis rotary inertial navigation system controls the rotation of the frame according to a predetermined selection strategy and performs navigation calculation at the same time; records the attitude output during the navigation process With the speed output, the calibration of the non-orthogonal angle of the three-axis rotary inertial navigation system frame is realized through the recursive least square algorithm; the influence of the non-orthogonal angle of the frame on the attitude output of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More