

Obstacle avoiding device for high voltage direct current magnetic suspension inspection robot
A technology for inspection robots and high-voltage direct current, which is applied in the direction of electromechanical devices, manipulators, and control of mechanical energy, and can solve problems such as difficulties for robots to overcome obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
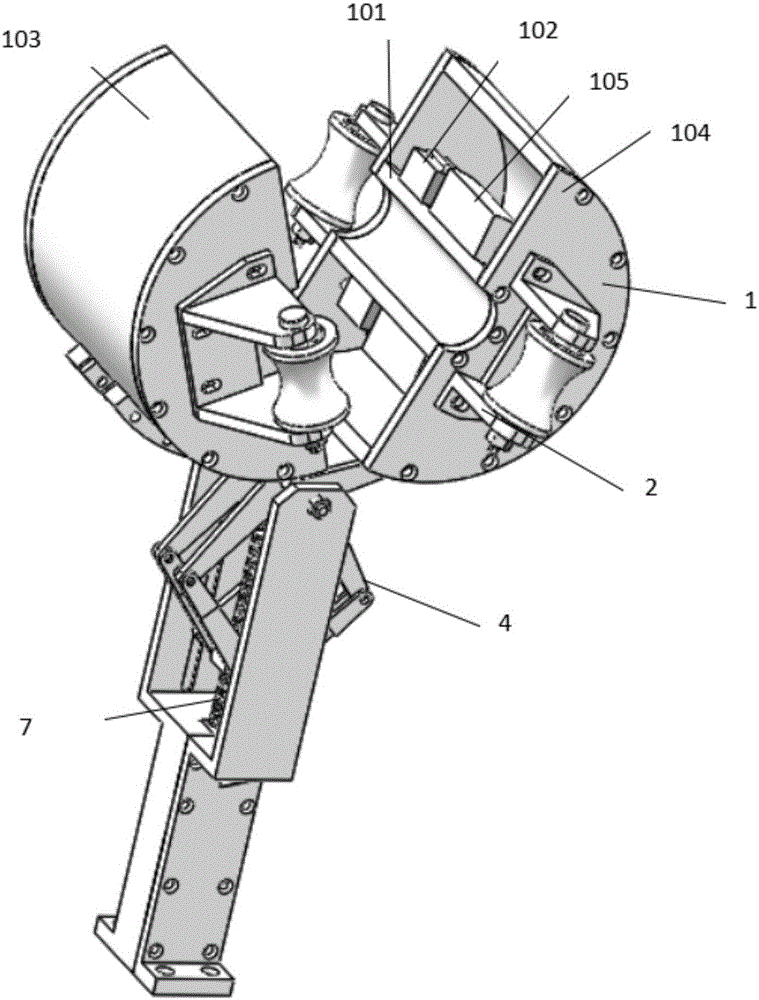
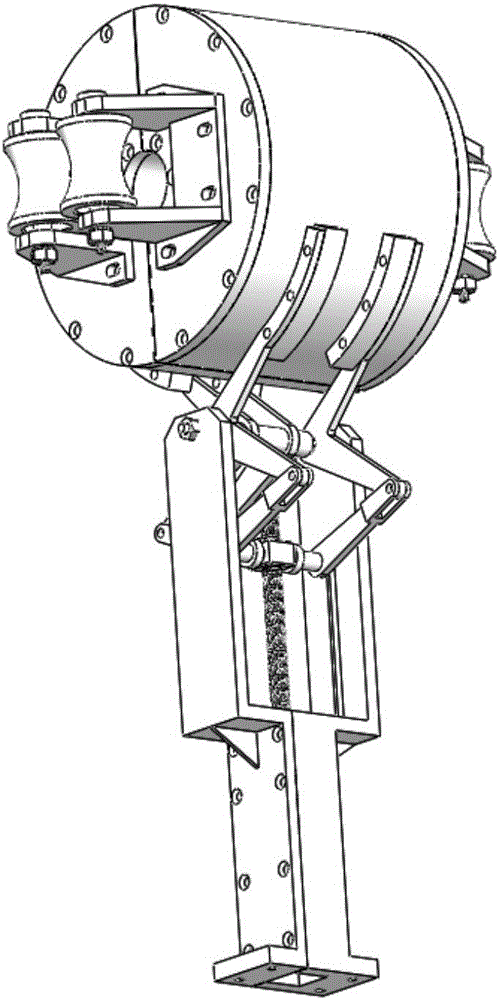
[0024] figure 1 When the high-voltage line maglev inspection robot crosses obstacles, the robot opens a three-dimensional view, figure 2 After the high-voltage line maglev inspection robot crosses the obstacle, the robot closes the three-dimensional view.
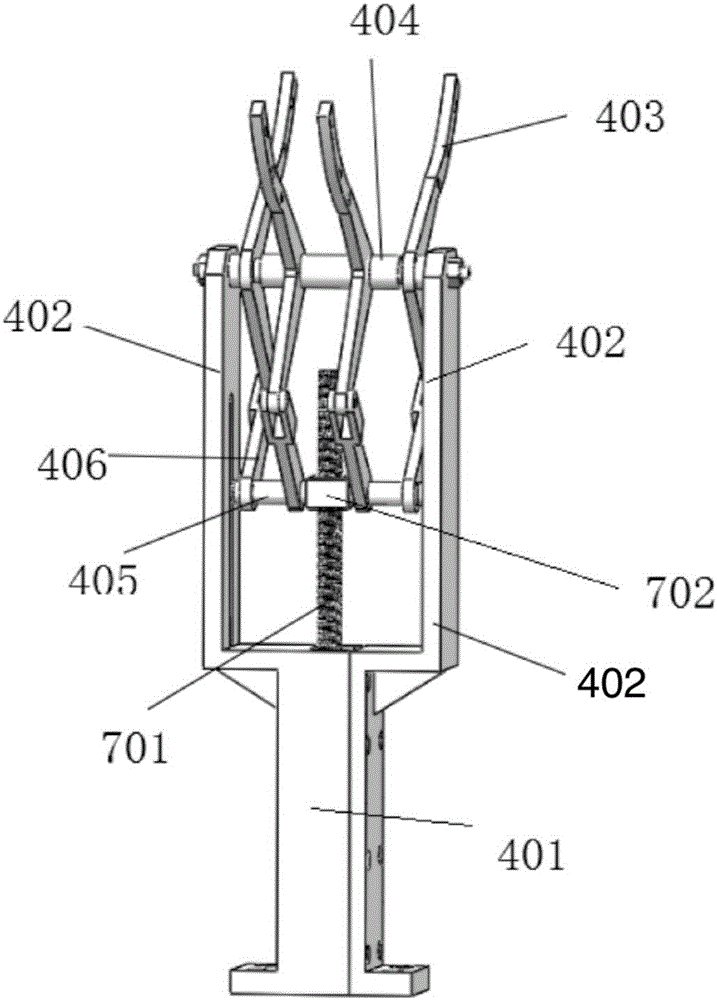
[0025] Such as figure 1 and figure 2 As shown, a high-voltage DC maglev inspection robot obstacle avoidance device includes a freely openable cavity box 1, a connecting rod mechanism 4, a walking wheel mechanism 2, and a control box 6. The middle part of the cavity box 1 is provided with There is a wire protective cover 101 for protecting the high-voltage line 3, and a driving coil 102 and a suspension coil 105 are arranged around the wire protective cover 101 in the cavity box 1. The walking wheel mechanism 2 includes two sets of walking wheels, and the cavity The box body 1 is divided into a left box body 103 and a right box body 104 which can be opened and closed. The wire protection cover 101, the levitation coil ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More