

Unmanned aerial vehicle path planning method based on floyd algorithm
A technology for path planning and unmanned aerial vehicles, applied in the direction of navigation calculation tools, etc., can solve the problems of low efficiency and high computational complexity, and achieve the effect of high efficiency, simple and effective methods, and easy to understand.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with accompanying drawing:
[0032] Such as Figure 1 to Figure 6 Shown:
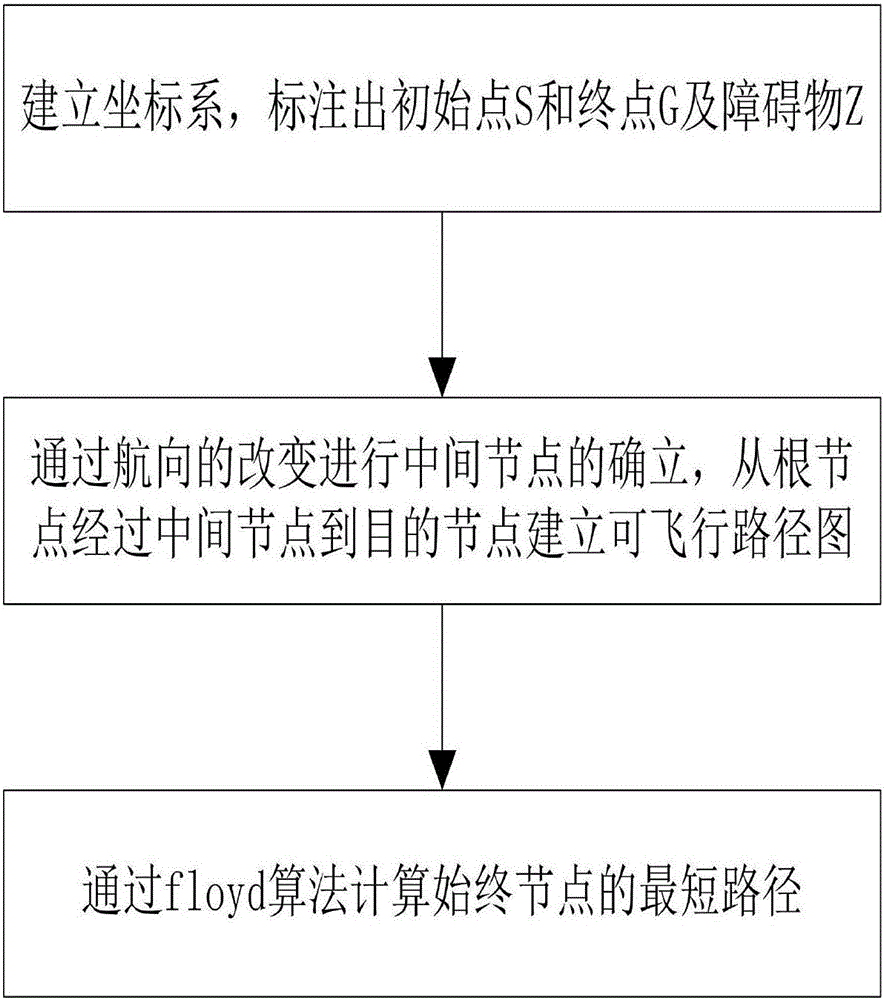
[0033] A UAV path planning method based on the floyd algorithm, this method is a dynamic path planning based on floyd. Starting from the weighted adjacency matrix A=[a(i,j)]n×n of the graph, recursively perform n times of updates, that is, the matrix D(0)=A, according to a formula, constructs the matrix D(1) ; Construct D(2) from D(1) with the same formula; ... ; Finally, construct matrix D(n) from D(n-1) with the same formula. The element in row i and column j of matrix D(n) is the shortest path length from vertex i to vertex j, and D(n) is called the distance matrix of the graph. At the same time, a successor node matrix path can be introduced to record the distance between two points. the shortest path of . This method finds the shortest path between nodes.
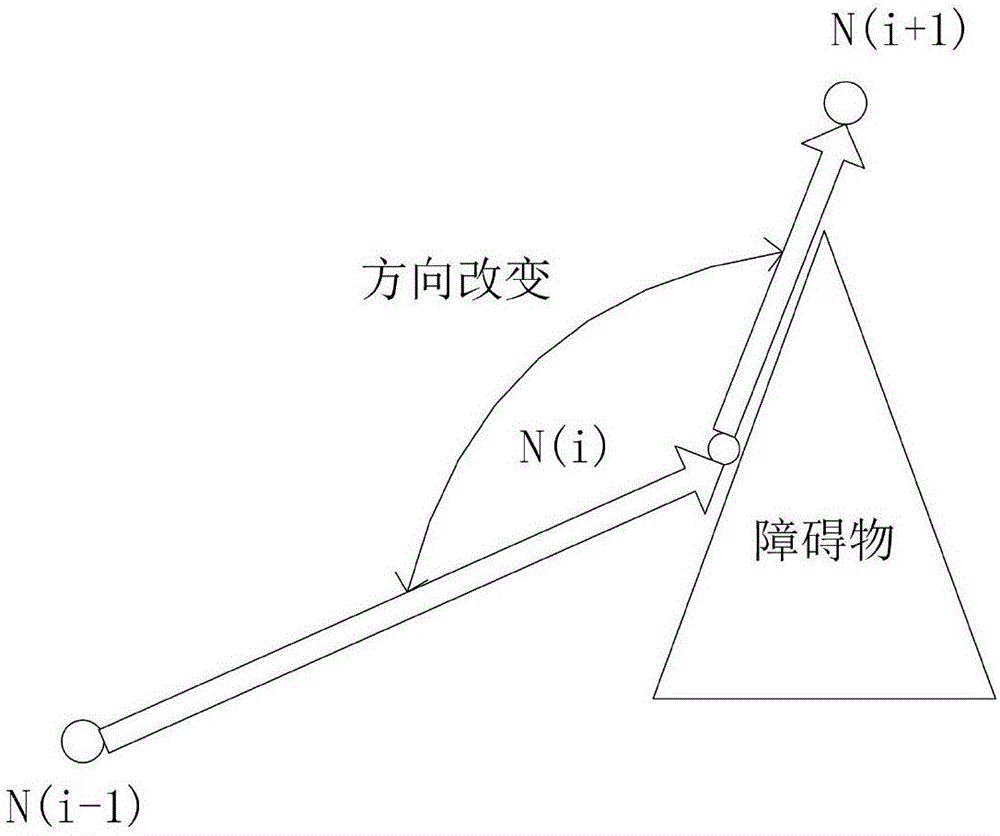
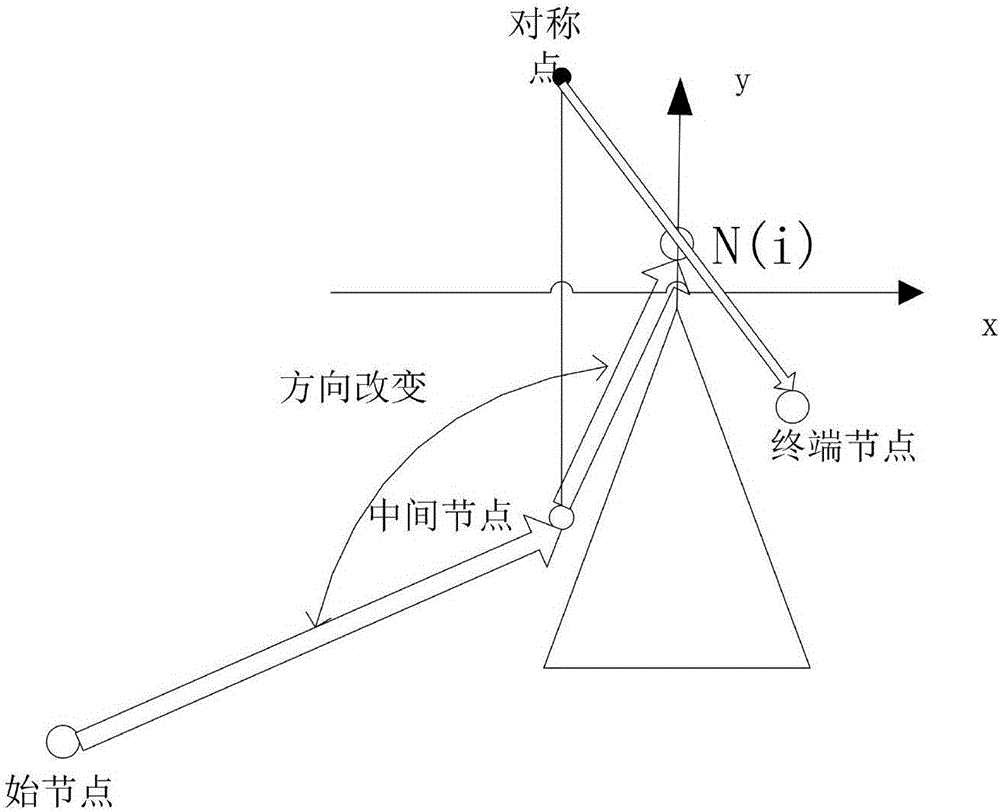
[0034] This method is divided into three parts: determining ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More