Hierarchical matching strategy-based improved unmanned aerial vehicle three-dimensional information acquisition method
A technology of 3D information and acquisition method, which is applied in the field of improving the 3D information acquisition of drones, can solve the problems of high cost, poor portability, and tediousness, and achieve the effect of increasing the running speed, improving the matching success rate, and accurately matching the 3D positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
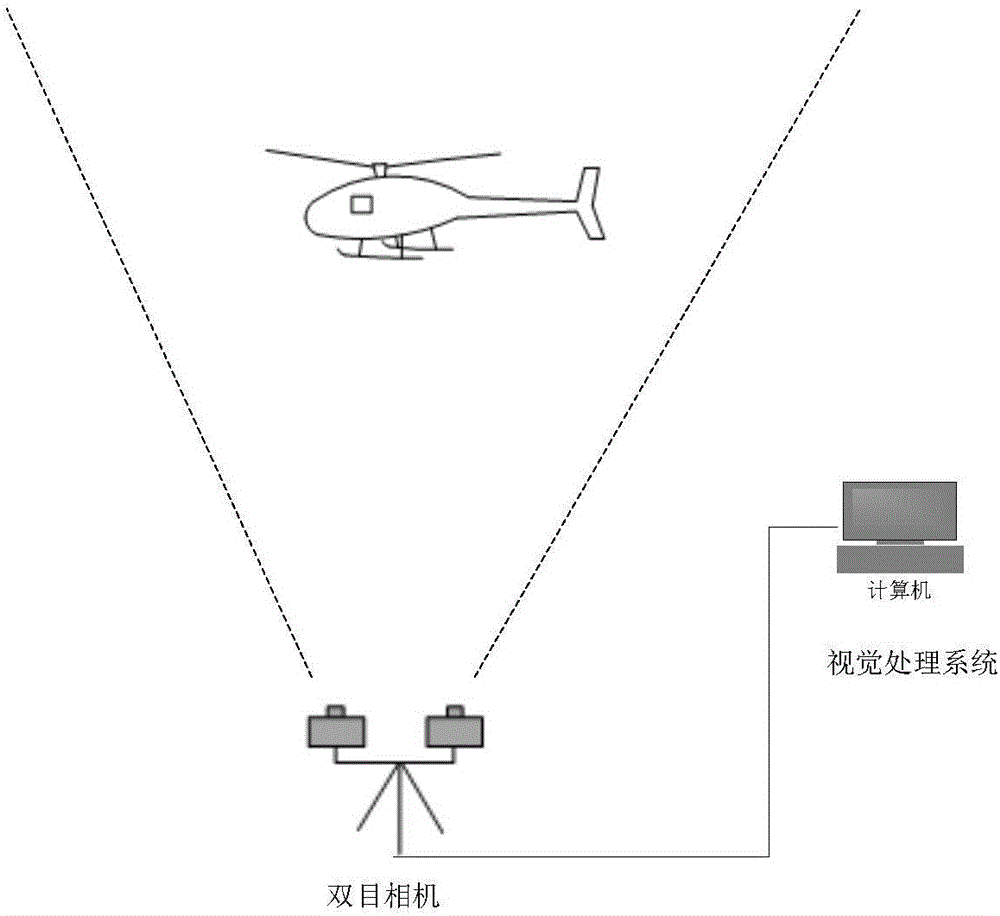
[0039] The present invention proposes an effective method: using binocular vision technology, combined with the background situation of the hovering state of the UAV, an improved UAV three-dimensional information acquisition technology based on a hierarchical matching strategy is proposed to realize the detection and tracking of the UAV , precise matching and three-dimensional positioning, the system composition is as follows figure 1 .
[0040] In order to obtain the real-time position information of UAVs in three-dimensional space, the present invention designs a set of measurable UAVs by using the principle of binocular stereo vision parallax and combining the improved algorithm based on neighborhood gray scale from coarse to fine. A system for real-time 3D position. First, the video image is corrected by combining the binocular camera calibration;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com