

Segmentation model training method and apparatus, road segmentation method and apparatus, and vehicle control method and apparatus
A technology for segmenting models and training methods, applied in the computer field, can solve problems such as high cost, low efficiency, and labor consumption, and achieve high accuracy, high efficiency, and less time-consuming effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
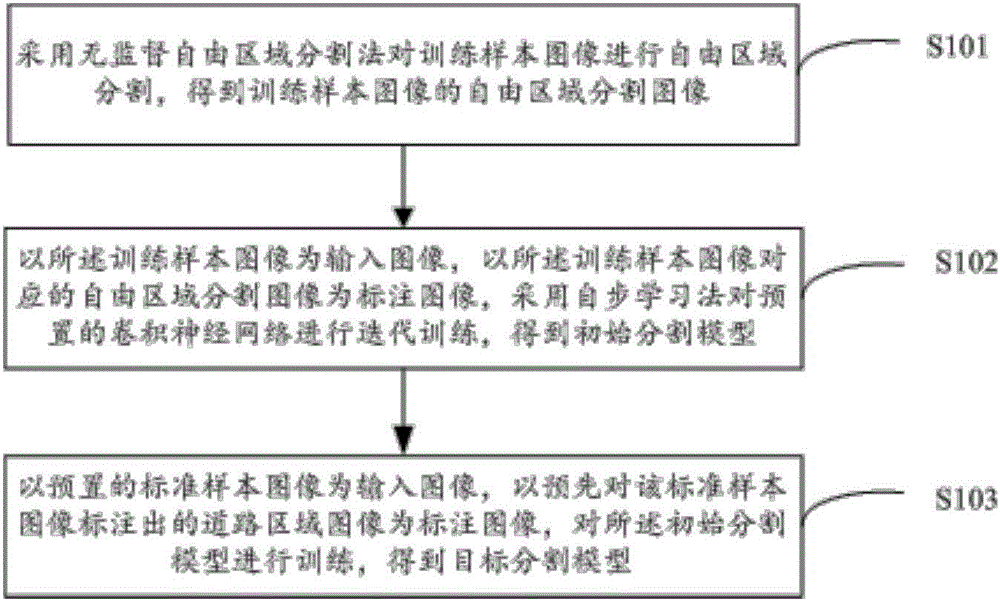
[0053] figure 1 , is a flowchart of the segmentation model training method provided in Embodiment 1 of the present invention, the method includes:
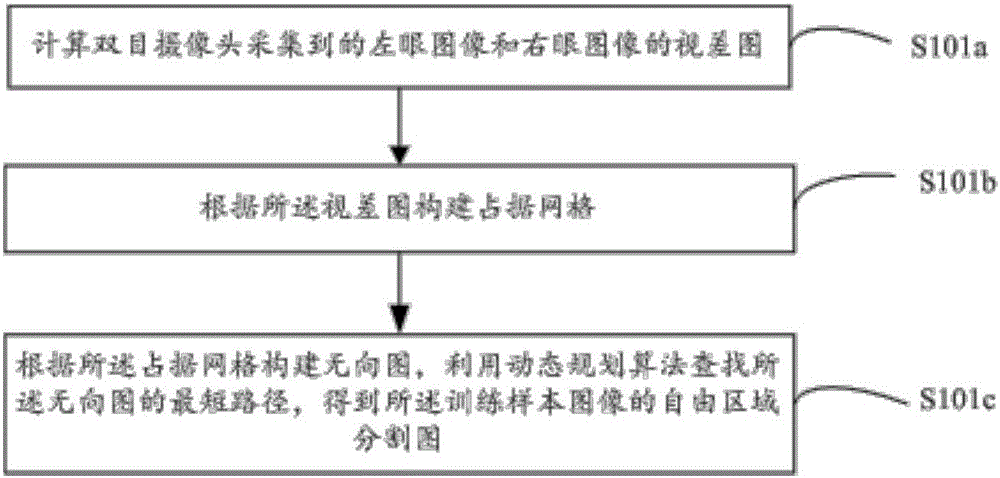
[0054]Step S101 : performing free region segmentation on the training sample image by using an unsupervised free region segmentation method to obtain a free region segmented image of the training sample image.
[0055] In step S101, the training sample image may be a left-eye image or a right-eye image collected by a binocular camera installed on a vehicle.
[0056] The unsupervised free area segmentation method refers to the use of an unsupervised method to segment the free area in the image (that is, the area without obstacles, such as roads, grass, etc.); the unsupervised method means that it does not need to learn the road segmentation images that are manually labeled , directly segment the free area in the training sample image according to a certain learning method.
[0057] Step S102, using the training sample image as th...
Embodiment 2
[0116] Embodiment 2 of the present invention provides a road segmentation method, and the target segmentation model used in the road segmentation method is trained by the training method provided in the foregoing embodiment 1.
[0117] see Image 6 , is a flow chart of a road segmentation method provided in Embodiment 2 of the present invention, the method includes:
[0118] Step S601: Receive an image to be segmented.
[0119] Step S602: Input the image to be segmented into a target segmentation model, and output a road region segmented image of the image to be segmented.
[0120] In Embodiment 2 of the present invention, the target segmentation model is pre-trained according to the segmentation model training method provided in Embodiment 1.
Embodiment 3
[0122] Embodiment 3 of the present invention provides a vehicle control method, such as Figure 7 As shown, the method includes:
[0123] Step S701: receiving the image of the road environment ahead captured by the camera on the vehicle;
[0124] Step S702: Input the image into the target segmentation model to obtain the road area segmentation image of the image, wherein the target segmentation model is trained by the method of Embodiment 1;
[0125] Step S703: Obtain the drivable area of the road ahead according to the segmented image of the road area;
[0126] Step S704: Control the driving direction of the vehicle according to the drivable area and the vehicle position.
[0127] In practical applications, the camera installed on the vehicle can be a binocular camera or a monocular camera. The camera feeds back the image of the road environment ahead to the control device, and the control device uses the image as the input image of the built-in target segmentation model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More