

Clearance space-contained manipulator simulation device
A technology of a space manipulator and a simulation device, which is applied in the aerospace field to achieve the effect of ensuring reliability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
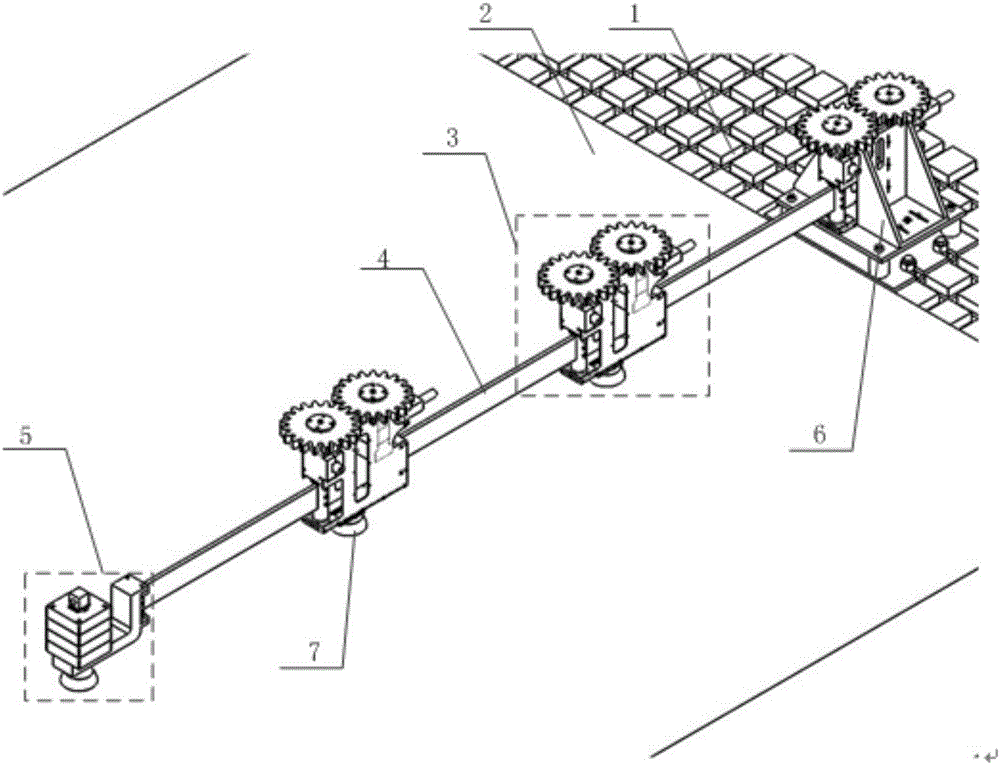
[0008] Specific implementation mode 1: Combination figure 1 To illustrate this embodiment, the device for simulating a mechanical arm with gap space in this embodiment includes a test bench 1, an air bearing table 2, an arm rod 4, a mass adjustable load mechanism 5, a base 6 and three joints 3, One end of the rod 4 is connected to the base 6 through a joint 4, the base 6 is fixedly installed on the test bench 1, the other two joints 3 are installed on the arm 4, and the other end of the arm 4 is connected to the mass adjustable load mechanism 5. The lower ends of the mass adjustable load mechanism 5 and the other two joints 3 are each provided with an air floatation mechanism 7, and the mass adjustable load mechanism 5 and the other two joints 3 can both pass through the air floatation mechanism 7 in the air floatation table 2 on the move.
[0009] In this embodiment, a rectangular profile connection is adopted between the joint 3 and the arm 4, and the profile connection adopts ...
specific Embodiment approach 2
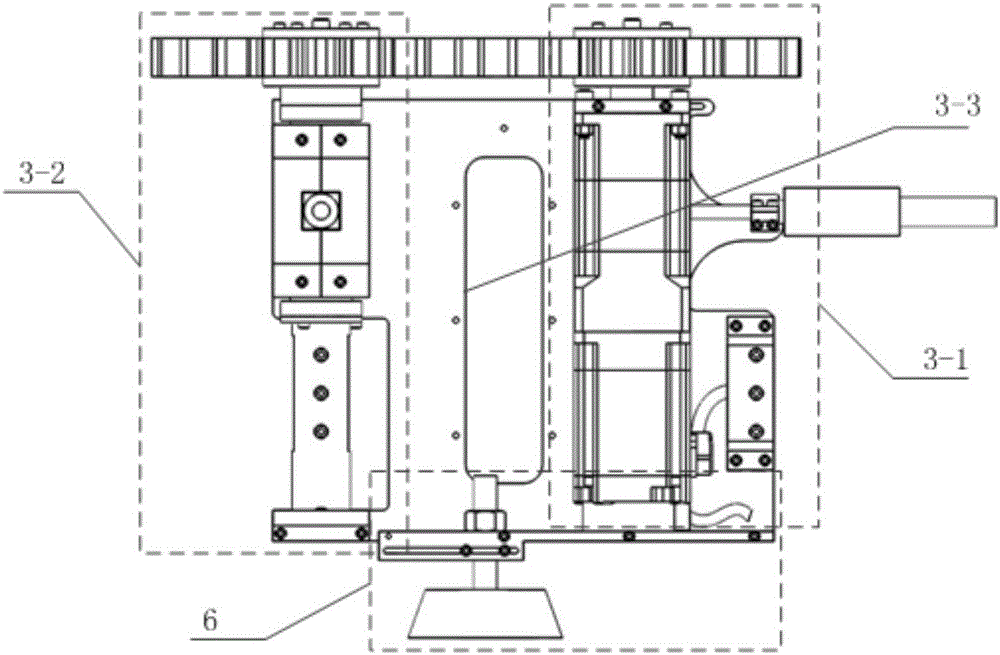
[0010] Specific implementation manner two: combination figure 2 To illustrate this embodiment, each joint 3 of the mechanical arm simulation device with clearance space described in this embodiment includes an active shaft system 3-1, a driven shaft system 3-2 and a joint housing 3-3, and an active shaft system 3 -1 and the driven shaft system 3-2 are installed side by side on the joint housing 3-3. The joint housing 3-3 is made of carbon fiber board, and is connected and fixed with the internal transmission and measuring device by connecting screws. The other components and connection relationships are the same as in the first embodiment.
specific Embodiment approach 3
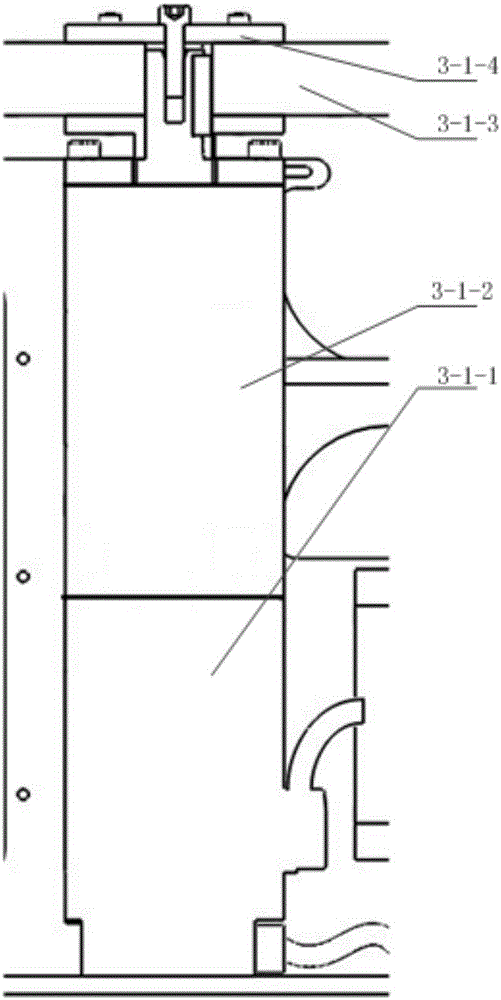
[0011] Specific implementation mode three: combination Figure 3 to Figure 6 To illustrate this embodiment, the driving shaft system 3-1 of a manipulator simulation device with clearance space described in this embodiment includes a motor 3-1-1, a reducer 3-1-2, a driving gear 3-1-3 and The shaft end retaining ring 3-1-4, the driving gear 3-1-3 is installed on the output shaft of the reducer 3-1-2 through the shaft end retaining ring 3-1-4, and the input of the reducer 3-1-2 The shaft is connected with the rotating shaft of the motor 3-1-1; the driven shaft system 3-2 includes the driven gear 3-2-1, the connecting shaft 3-2-2, the upper connecting flange 3-2-3, and the torque Speed sensor 3-2-4, sensor housing 3-2-5, lower connecting flange 3-2-6, output shaft 3-2-7 and bearing seat 3-2-8, driven gear 3-2- 1 Set on the connecting shaft 3-2-2, the connecting shaft 3-2-2 is connected to the upper end of the torque speed sensor 3-2-4 through the upper connecting flange 3-2-3, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More