

Drilling hydraulic mining downhole excavating robot
A technology of robots and mining wells, which is applied in the field of drilling, can solve the problems of large-scale popularization and application of drilling hydraulic mining technology, insufficient flowback of ore slurry, and difficulty in mining completion, so as to reduce drilling costs and improve production safety. The effect of improving drilling efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The principles and features of the present invention will be further described below in conjunction with the accompanying drawings. The examples given are only used to explain the present invention, not to limit the scope of application of the present invention.
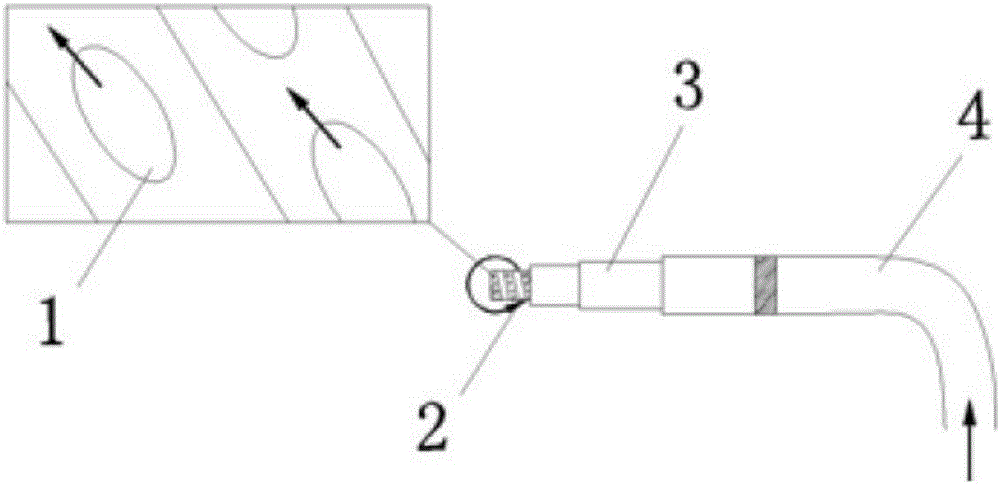
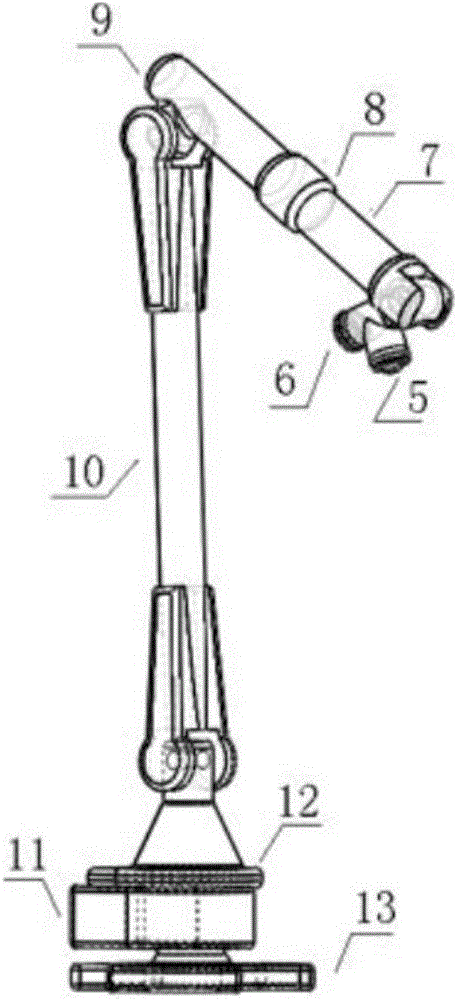
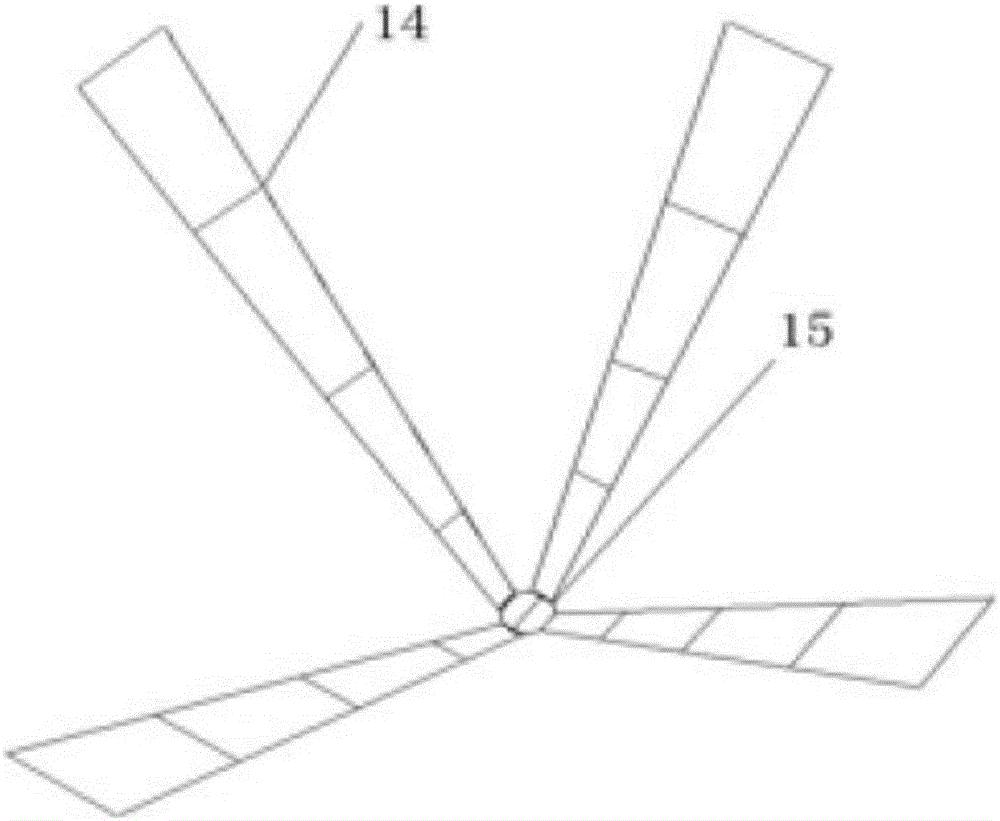
[0025] refer to Figure 1 to Figure 5 As shown, the drilling hydraulic mining underground mining robot of the present invention includes: a spiral hydraulic rotary nozzle 2, a telescopic support 3, a water supply hose 4, an infrared scanning device and a measuring device joint 5, a water supply hose joint 6, Hollow drill string 7, protective cover joint 8, drill pipe inner water pipe joint 9, crank rod 10, integrated electrical control box 11, 360° rotating support 12, mechanical arm base 13, foldable protective blade 14, mechanical arm Connector 15, mobile carrying platform 16, transmission wheel 17, toothed crawler belt 18, transmission shaft base 19, transmission shaft 20, spring shock absorber 21, hydrauli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More