

Virtual reality helmet distortion complete machine detection method and device
A virtual reality and helmet technology, applied in the field of virtual reality, can solve the problems of inability to detect the distortion parameters of virtual reality helmets, and achieve the effects of improving accuracy and adaptability, facilitating setting, and preventing interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to solve the defect that current virtual reality equipment cannot detect lens distortion parameters, the present invention provides a method and device for detecting distortion of virtual reality helmets.
[0031] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
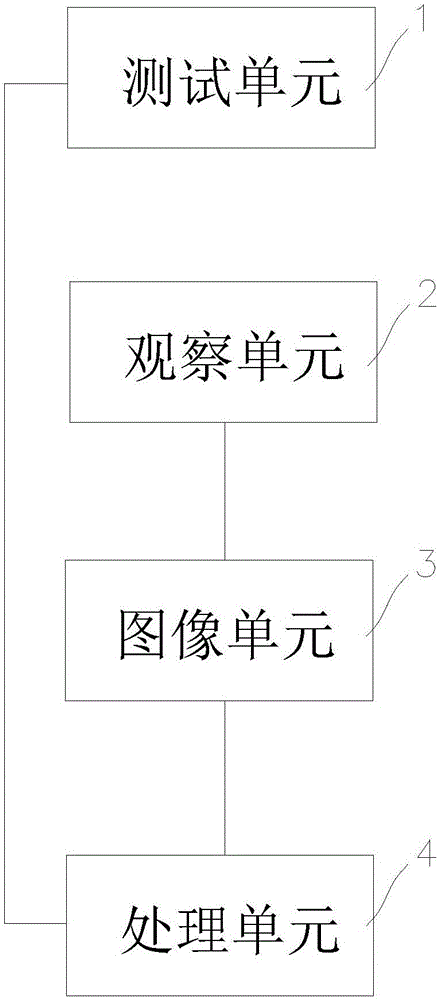
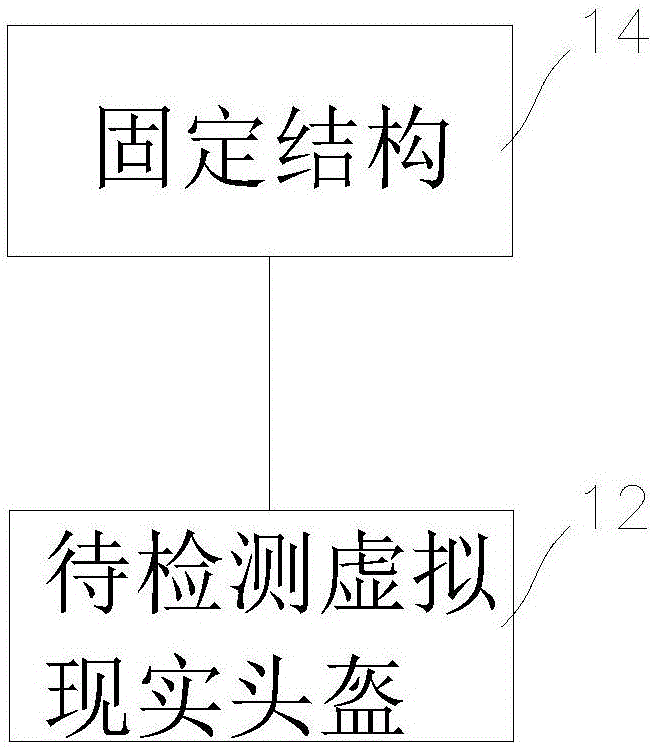
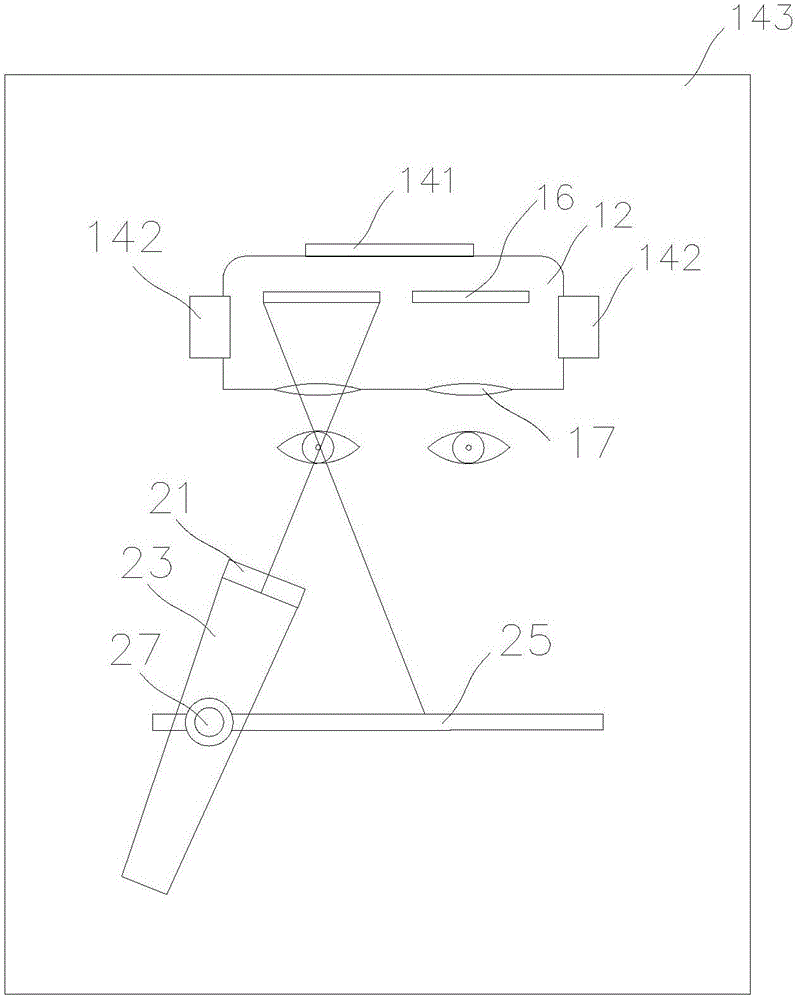
[0032] see figure 1 — figure 2 , the virtual reality helmet distortion detection device of the present invention includes a detection unit 1 , an observation unit 2 , an image unit 3 and a processing unit 4 . Wherein, the detection unit 1 includes a virtual reality helmet 12 to be detected and a fixing structure 14 , and the virtual reality helmet 12 to be detected is detachably fixed on the fixing structure 14 . The image unit 3 is electrically connected to the observation unit 2 , and the process...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More