

VCKF-based multi-robot collaborative navigating and positioning method
A technology of collaborative navigation and positioning method, applied in navigation calculation tools, complex mathematical operations, etc., can solve problems such as uncertainty and nonlinearity, and achieve the effect of improving positioning accuracy, accuracy and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with specific implementation examples.
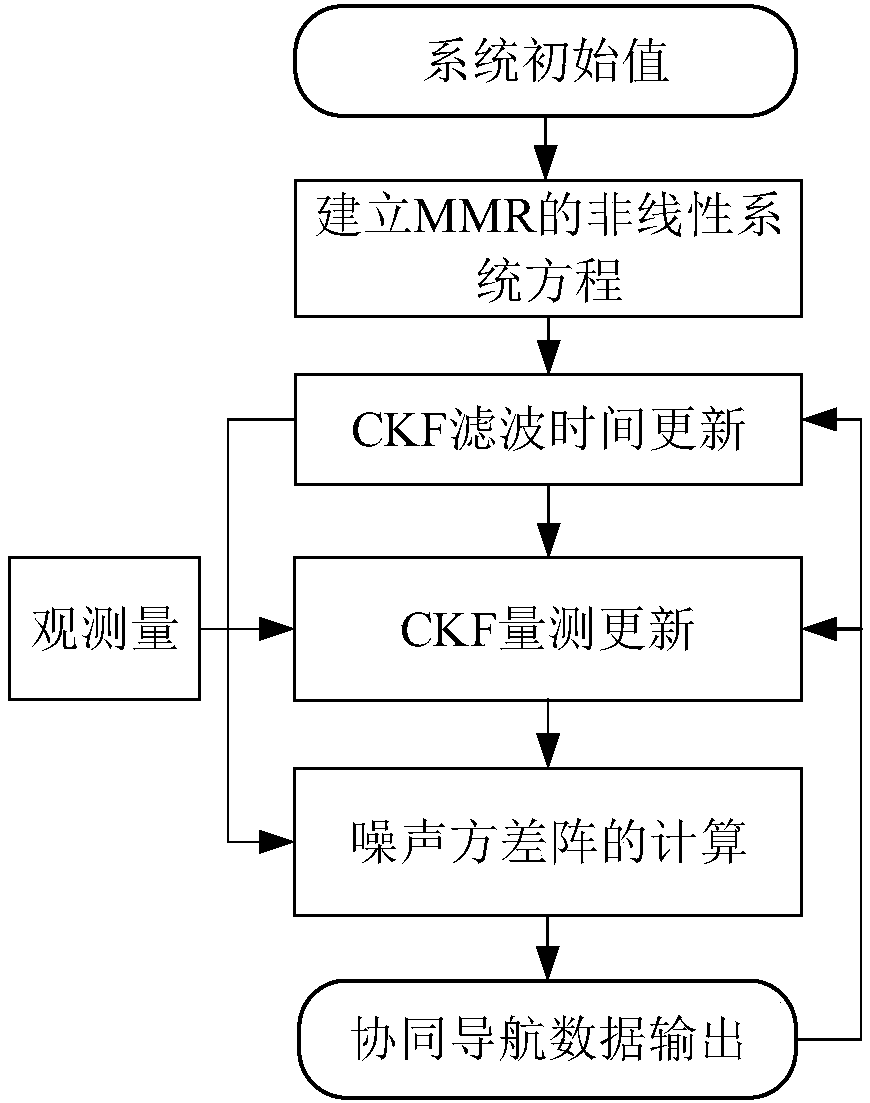
[0022] The present invention is a multi-mobile robot collaborative navigation positioning algorithm based on CKF and VCE methods, combining figure 1 Shown algorithm flow chart, its specific implementation mode is:
[0023] Step 1: First, according to the work tasks of the multi-mobile robot, build a reasonable working environment, determine the fixed landmark points in the surrounding environment of the multi-mobile robot, and measure the position of each fixed landmark point in the working environment and the initial position of each mobile robot and posture information;
[0024] Step 2: Construct the state vector including multi-robot positions and poses:
[0025] X=[X 1 x 2 … X n ] T
[0026] where X i =[x i ,y i ,θ i ] T Represents the pose of the i-th robot, according to the robot kinematics equation can be expressed as:
[0027]
[0028...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More