

Petrochemical plant inspection robot environment modeling and map building device and method
An inspection robot and map construction technology, which is used in measurement devices, instruments, surveying and navigation, etc., can solve problems such as being unable to cope with a large number of indoor and sheltered environments, high equipment cost, and unfavorable for real-time map update, and achieves a high level of improvement. Adaptability and accuracy, guaranteeing safety and reliability, overcoming the effect of quality degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
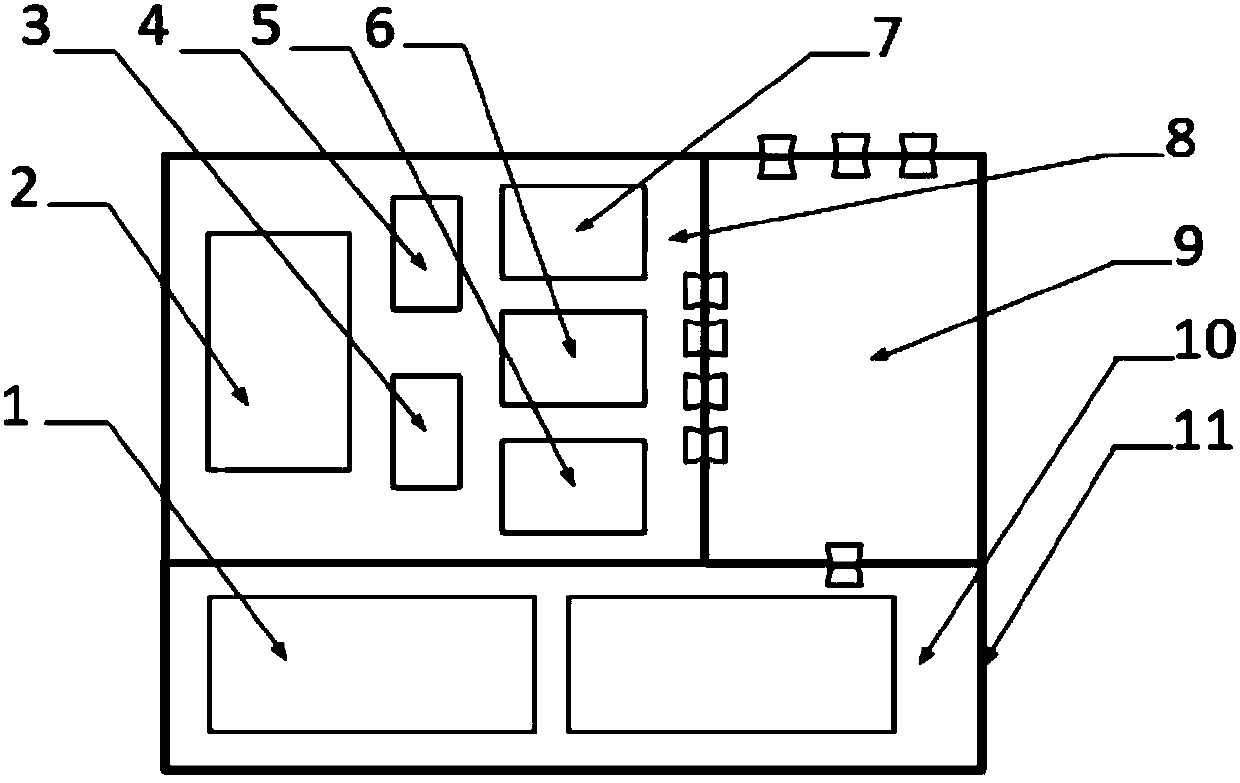
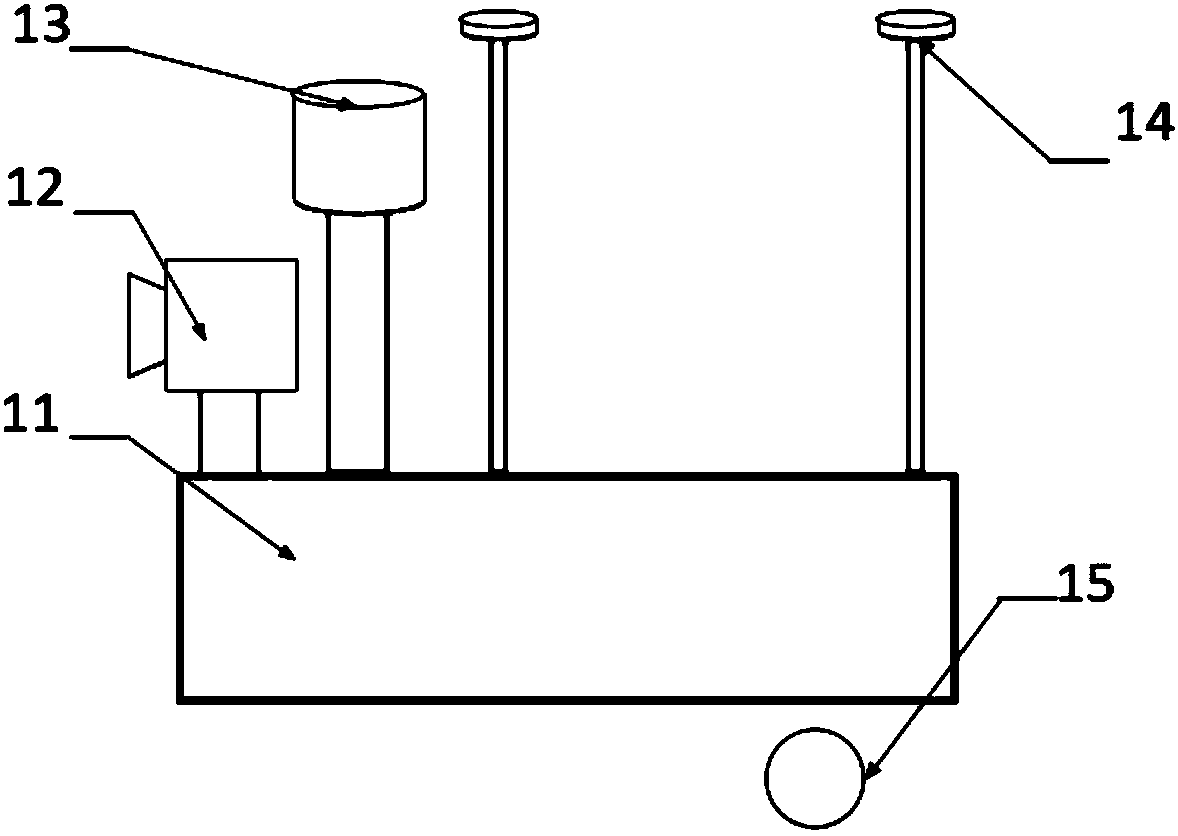
[0058] A petrochemical factory inspection robot environment modeling and map construction device, such as figure 1 As shown, it includes power module 1, industrial computer 2, inertial measurement module 3, differential GPS module 4, power conversion module 5, signal isolation safety barrier module 6, communication module 7 and flameproof housing 11, and flameproof housing 11 points There are three chambers: main control chamber 8, wiring chamber 9 and power supply chamber 10, industrial computer 2, inertial measurement module 3, differential GPS module 4, power conversion module 5, signal isolation safety barrier module 6 and communication module 7 are installed in The main control chamber 8 and the wiring chamber 9 are connected to various power supply and communication cables, and the power supply chamber 10 is equipped with a power modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More