

Method for system state detection and initial work of mobile robot
A mobile robot and system status technology, applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve problems such as economic loss, low operating efficiency, and difficult handling of hazardous solutions, and achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
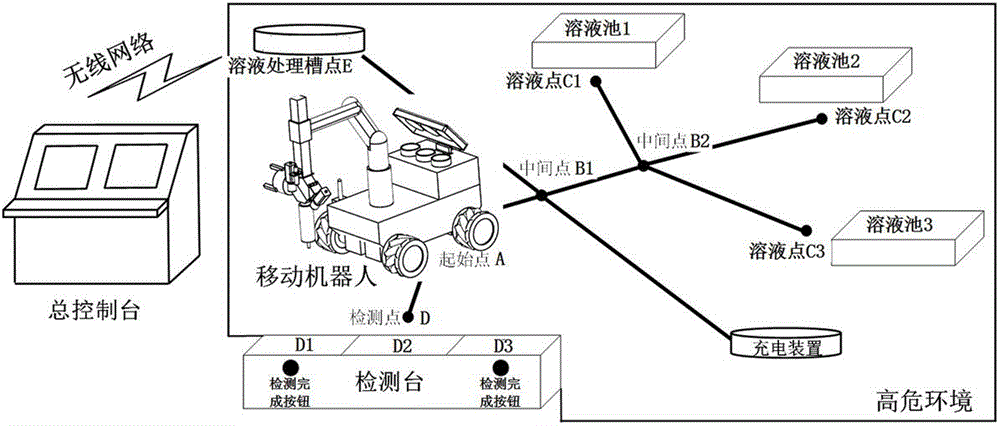
[0048] According to the characteristics of hazardous chemical solutions and the process of automatic quantitative extraction, considering the operational safety and the reliable realization of functions, an automatic quantitative extraction system for hazardous chemical solutions in high-risk environments based on mobile robots is designed. The working principle is as follows: figure 1 shown. The idea of separating the control mechanism and the executive mechanism is adopted as a whole. The mobile robot system is placed inside the high-risk environment as the actuator, and the main console is placed outside the high-risk environment as the control mechanism. It has good flexibility in the scene where the chemical composition is uncertain, there are many types, and the random quantitative extraction of hazardous chemical solutions with high sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More