Cam driven mechanical hand
A technology of manipulator and cam transmission, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of low air pressure driving precision, slow movement speed, and large impact vibration, etc., and achieves simple driving methods, low manufacturing costs, and guaranteed The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
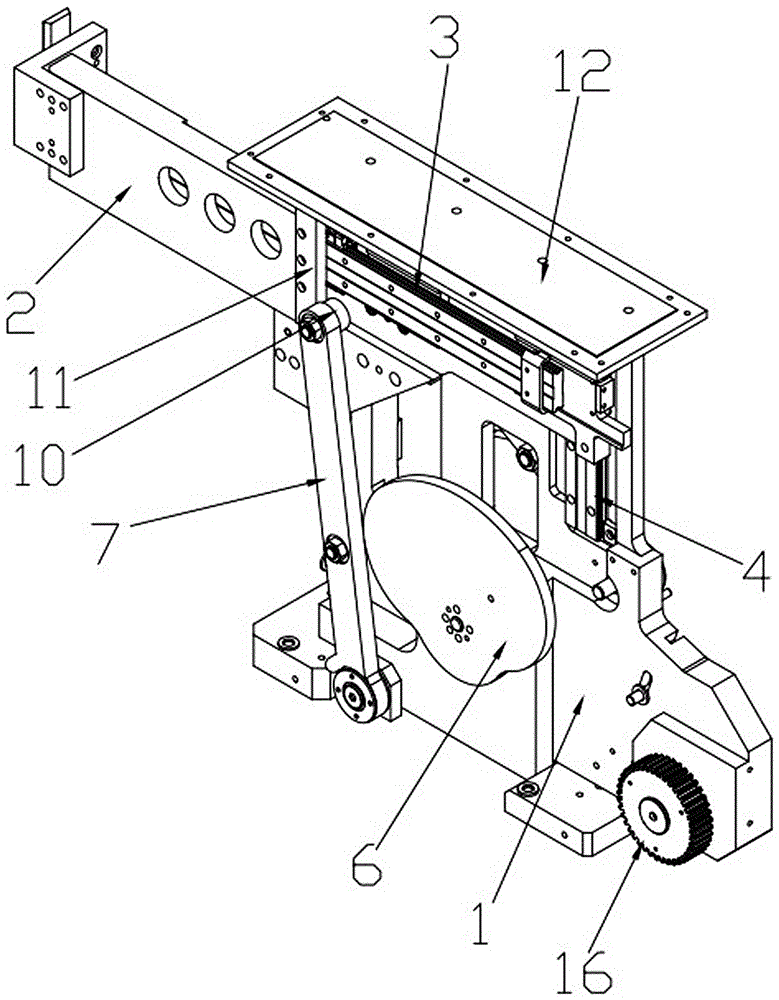
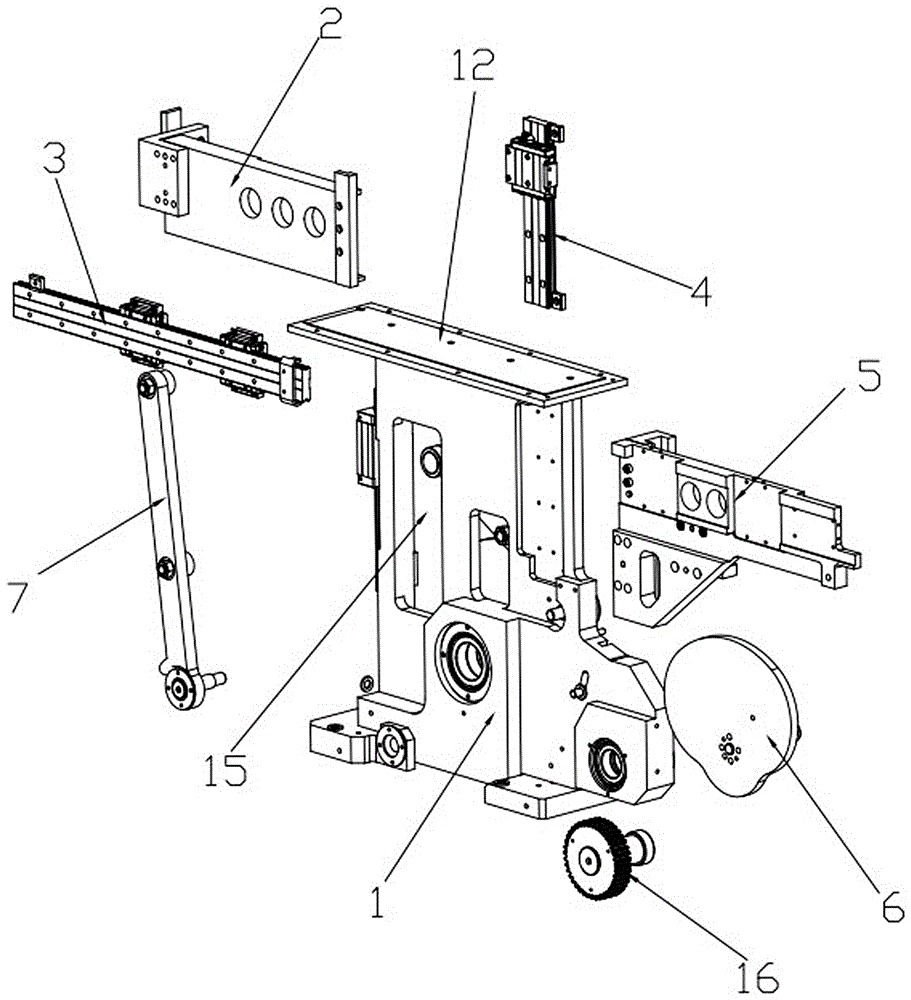
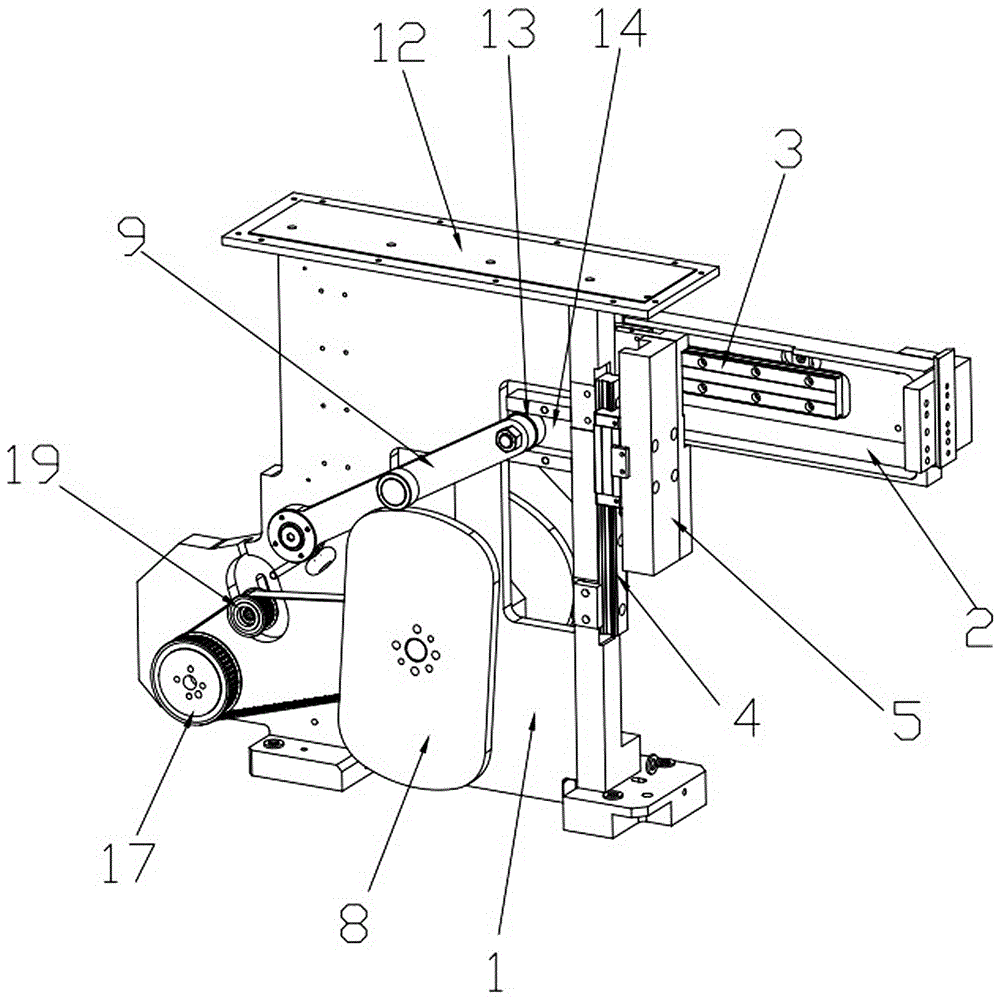
[0024] In this embodiment, refer to Figure 1 ~ Figure 4 , the cam-driven manipulator of its specific implementation includes a main board 1, a guide rail assembly, a horizontal bracket 2 and a synchronous transmission assembly. The main board 1 is a vertical structure. Guide rail 3 and vertical guide rail 4, vertical guide rail 4 is provided with a group altogether, is vertically installed on the front and rear ends of main board 1 respectively, and is provided with main support 5 on the slide block of vertical guide rail 4, makes main support 5 can Sliding up and down along the vertical guide rail 4, the horizontal bracket 2 is fixedly installed on the front end of the horizontal guide rail 3, the slider of the horizontal guide rail 3 is installed on one side of the main bracket 5, and the inner side of the horizontal bracket 2 is p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More