

Device and method for active compliance control for XYZR four-axis drilling robot
A technology of active compliance and control devices, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve problems such as unqualified burrs, high cost, and deformation of drilling objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
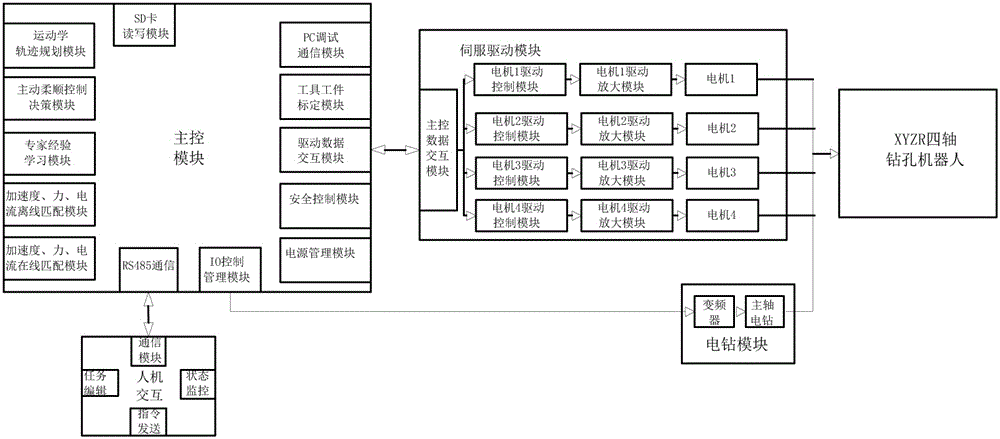
[0066] The present invention will be described in detail below in conjunction with the drawings. The present invention proposes an XYZR four-axis drilling robot active compliance control device, such as figure 1 As shown, the control object is a four-way servo motor module and an electric drill module. The device includes a main control module, a servo drive control module, and a human-computer interaction module; the main control module and the servo drive control module are connected to each other, and the servo drive control module is connected to The electric drill module is connected, and the main control module is also connected to the man-machine interaction module;
[0067] The main control module is used to complete kinematics trajectory planning, active compliance control decision-making, expert experience learning, acceleration-force-current offline matching, acceleration-force-current online matching, communication management, IO management, and drive data interaction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More